-
業種・地域から探す

続きの記事![]()
メカトロテックジャパン2025(2025年10月)
工作機械見本市「メカトロテックジャパン(MECT)2025」が10月22日から25日までの4日間、ポートメッセなごや(名古屋市港区)で開催される。今回は過去最多の出展者数となり、早期に出展申し込みを締め切るなど産業界からの期待も大きい。「この発見、激アツ!」をテーマに各社が多数の実機を展示する。工作機械、鍛圧・板金機械、自動化やIoT(モノのインターネット)にまつわる新製品が一堂に会する。主催はニュースダイジェスト社(名古屋市千種区、八角秀社長)、愛知県機械工具商業協同組合(同熱田区、水谷隆彦理事長)との共催。
磁気浮上ベアリングレスモーター技術の最前線
【執筆】 東京電機大学 工学部 電気電子工学科 准教授 杉元 紘也
高速化、高効率化への挑戦
カーボンニュートラルの実現に向けて、冷却ファン、ポンプ、コンプレッサー、ドローン、自動車、FA機器、ロボット、半導体製造装置などを駆動するモーターの高効率化・省エネルギー化の要求がより一層高まり、モーターの損失を低減する研究が活発化している。さらに小型・軽量、高効率・省エネルギーに加え、長寿命・メンテナンスフリーが強く求められており、一般的な解決策として低損失で高性能な機械的ベアリングの開発が行われている。しかし、従来技術の延長で機械的ベアリングの高性能化を進めても、機械的接触がある以上、損失が発生するためモーターの効率に限界がある。回転子を非接触で磁気浮上させるベアリングレスモーターは、従来のモーターの限界を突破するポテンシャルを有するため、近年高く注目されている技術の一つである。
非接触で回転軸支持
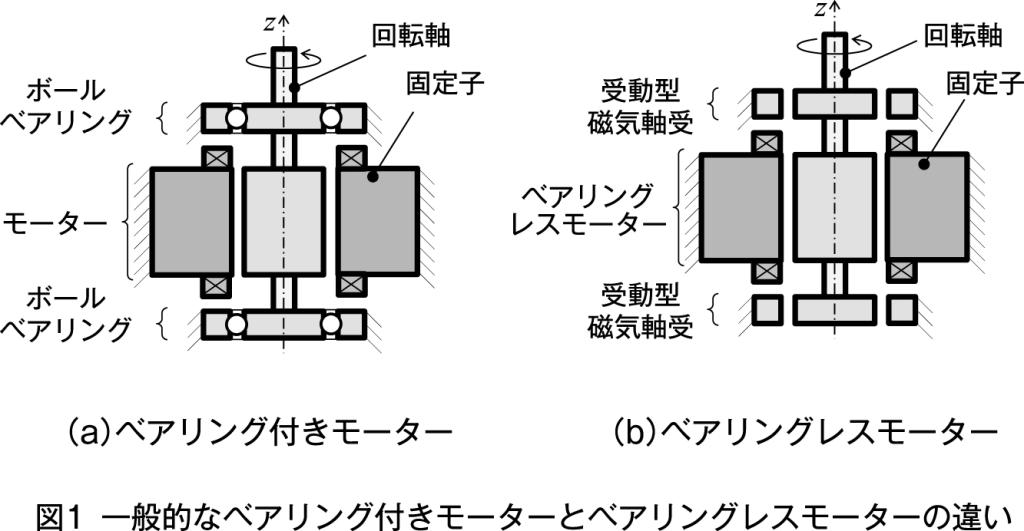
図1(a)、(b)にボールベアリング付きモーターおよびベアリングレスモーターのコンセプトを示す。一般的に、モーターには2個のボールベアリングが取り付けられ、回転軸が機械的に支持されている。一方、ベアリングレスモーターは、ボールベアリングが受動型磁気軸受に置き換えられ、さらにモーターがベアリングレスモーターに置き換えられている。
図1(b)は、ベアリングレスモーターの中で、能動的に磁気支持制御する軸数が最も少ない1軸制御形ベアリングレスモーターであり、回転子のz軸方向位置のみを能動的に制御するタイプである。したがって、ベアリングレスモーター部では、回転トルクと能動的な軸方向力を発生するように磁気回路設計する必要がある。
回転子の半径方向と傾き方向の変位は、受動型磁気軸受で受動的に安定するように設計される。したがって、ベアリングレスモーターは、非接触で回転軸を磁気支持するため、ベアリング損が発生せず、省エネルギー効果が期待される。
ハイブリッド構造
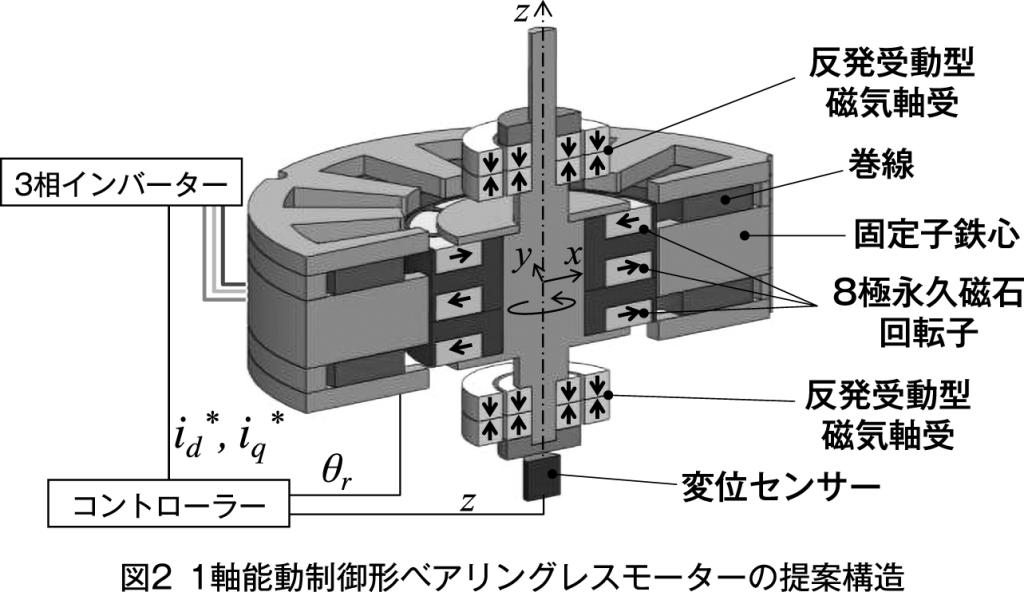
図2に、提案構造のベアリングレスモーターを示す。このコンセプトは、回転機とリニアモーターのハイブリッド構造であり、回転トルクと軸方向力を同時に発生させることが可能である。回転軸の両端には、半径方向と傾き方向を受動的に安定させるための反発受動型磁気軸受が取り付けられている。中央部は、回転トルクと能動的な軸方向力を発生させるベアリングレスモーターである。ベアリングレスモーターは、3層の8極永久磁石回転子と、同じく3層の固定子鉄心および巻線で構成されている。
中央層では主に回転トルクを発生し、上下層で軸方向力を発生させる。巻線は、一組の3相8極集中巻が、中央層の固定子鉄心にのみ施されている。回転軸の下方には、回転子の軸方向変位を検出するための変位センサーが取り付けられている。また、回転子の回転角度を検出するためのホールセンサーが、下層の固定子スロットに取付けられている。これらのセンサーのフィードバック信号から、コントローラーにて軸方向力および回転トルクの指令値が計算される。
提案構造は、軸方向力および回転トルクを、それぞれd軸およびq軸電流にて発生させることができるシングルドライブベアリングレスモーターであり、3相インバーター1台のみで、磁気支持と回転を実現することができる。d軸電流とは、回転子を磁気支持するための電流であり、q軸電流は回転トルクを発生させるための電流である。
つまり、ベアリングレスモーターは磁気支持するために電力が必要となるため、実際ベアリングレスモーターは、一般的なベアリング付きモーターと比較して、どれぐらい効率が向上するのか疑問があった。展示会でベアリングレスモーターの実機デモンストレーションを行った際も、企業の技術者から同様の質問を受けた。そこで、この問いに答えるため、ベアリング付きモーターとベアリングレスモーターの効率比較を行った。
低速域から優位性明らかに
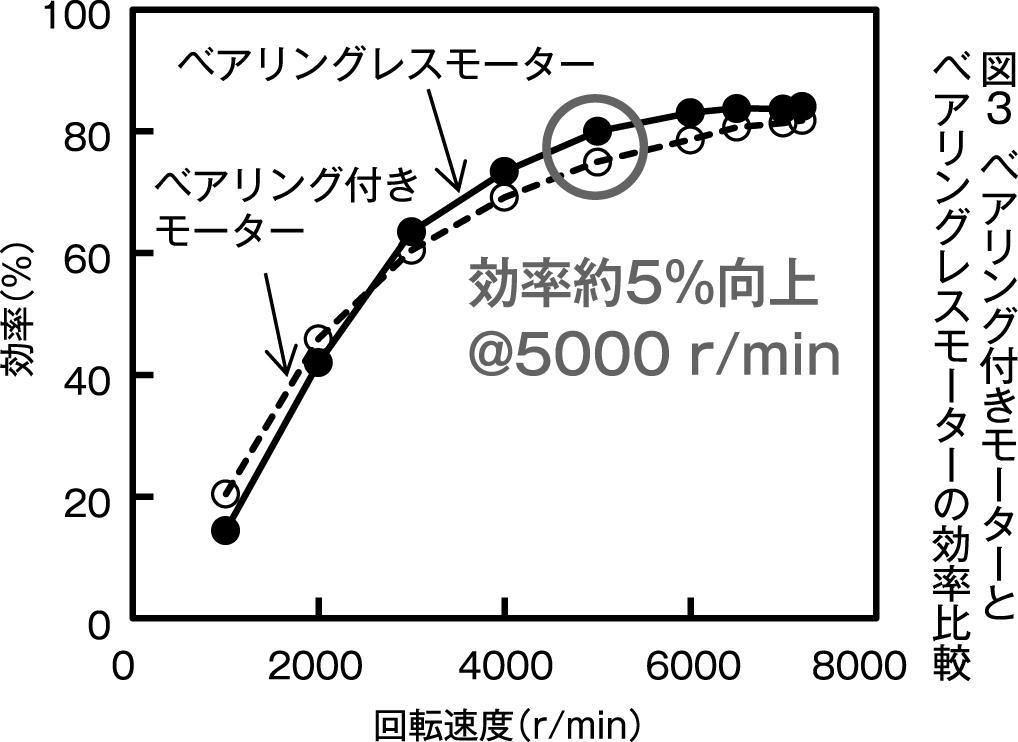
図3にベアリング付きモーターとベアリングレスモーターの効率を比較した結果を示す。これまで、ベアリングレス化による効率向上効果は実証されておらず、定説では数万回転以上になるとベアリングレスモーターの方が高効率になるといわれていた。試作機の定格回転速度は毎分7200回転であるため、ベアリングレス化による効率向上効果があるかは予想が付かずハイリスクな研究であった。
しかし、図3に示すように毎分2500回転以上の速度でベアリングレスモーターの方が高効率であることが明らかになった。数万回転以上の高速回転でないとメリットがないと思われていたこれまでの知見とは異なり、比較的低速域からベアリングレスモーターに優位性があることが明らかになった。
1軸制御形ベアリングレスモーターは、三相インバーター1台のみを用いて、d軸およびq軸電流でz軸方向の磁気支持力およびトルクをそれぞれ独立に制御することが可能である。このため、制御システムはシンプルである一方、制御しない半径方向と傾き方向の振動が大きく、安定な高速回転は困難であった。実際に、多くの研究者が振動を抑えることができず研究に行き詰っていた。
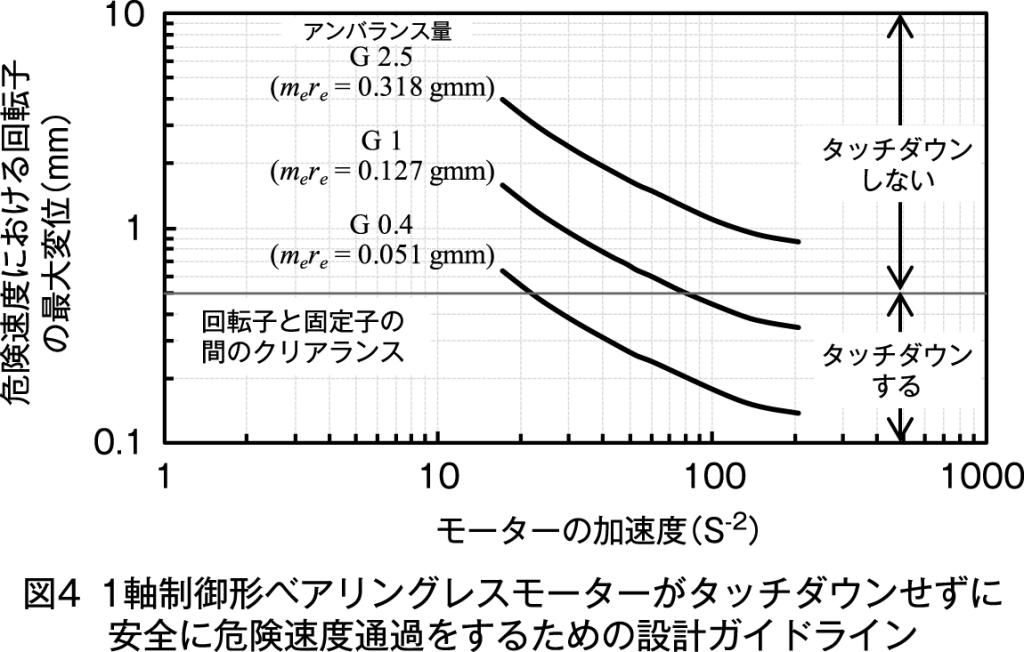
そこで、過電流リミットを無効にしてモーターを急加速させてみたところ、偶然にもタッチダウンせずに危険速度を通過させることに成功し、毎分3万回転までの安定な浮上回転に成功した。この偶然の成功から、図4に示す1軸制御形ベアリングレスモーターの設計ガイドラインを作成し、タッチダウンせずに危険速度を通過するために必要なモーターの加速度、固定子と回転子の間のギャップ長、アンバランス量の関係を理論的に導き出し、危険速度通過の体系的理論を構築した。
高速域での効率化を実証
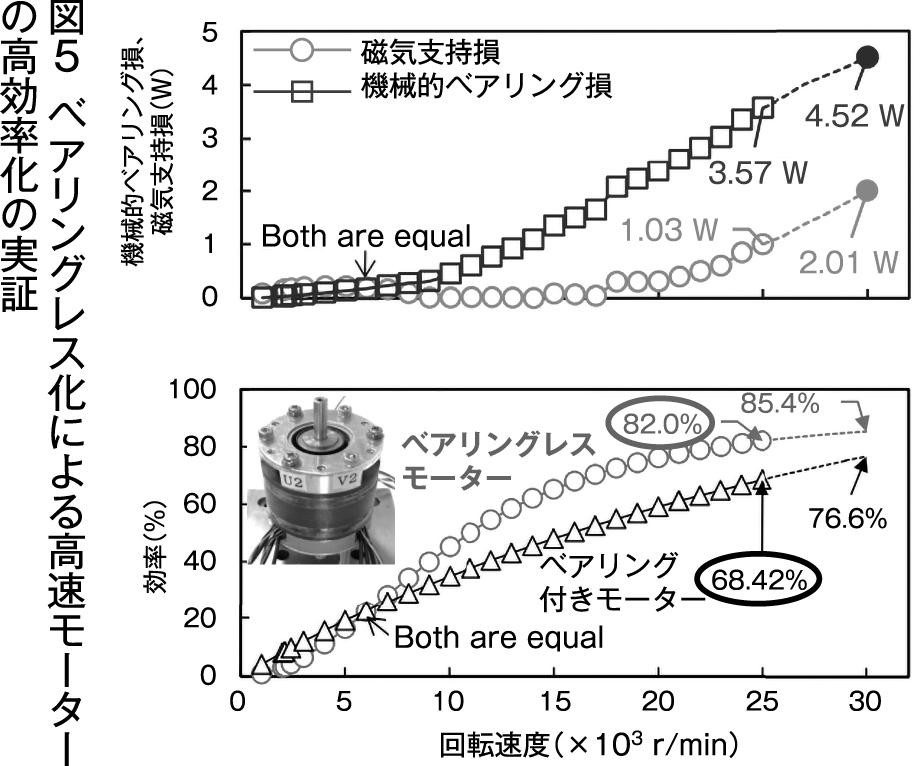
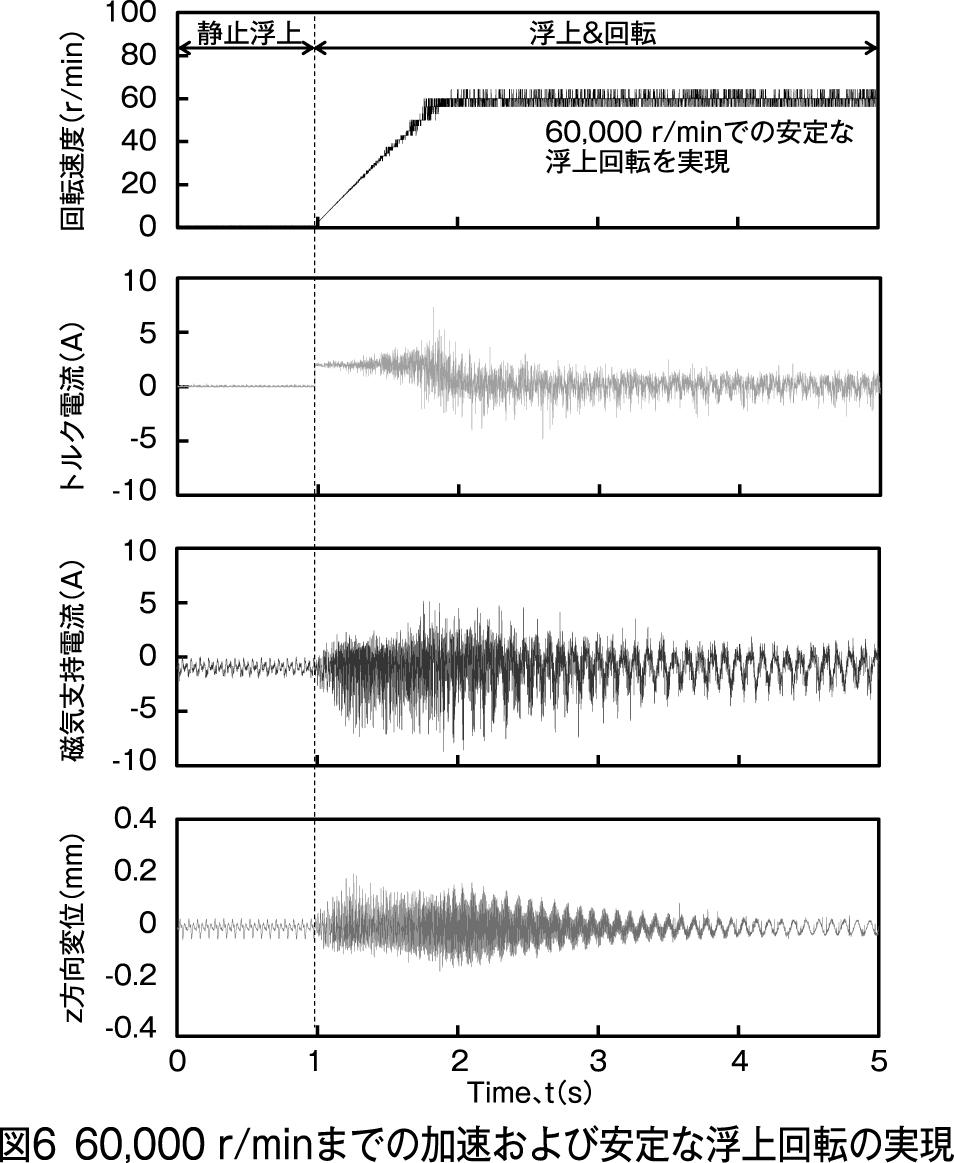
図5に、高速域でのベアリング付きモーターとベアリングレスモーターの効率比較を示す。毎分2万5000回転において、機械的ベアリング損は3・57ワットであるのに対し、磁気支持損はわずか1・03ワットであった。結果的に、ベアリングレスモーターにより効率は13・6%向上することを実証した。これまで定性的であった高速域でのベアリングレスモーターの優位性を定量的に実証した点が高く評価されている。
危険速度通過を実現した後、回転速度の限界は何で決まるのかという質問を多く受けるようになり、さらなる高速化にチャレンジした。図6に、毎分6万回転までの加速波形を示す。回転速度が増加するにつれ、デジタル制御の時間遅れの影響が大きくなり、毎分3万回転以上での安定な浮上回転は容易ではなかった。実際に、一般的な時間遅れ補償やdq軸間の非干渉制御を組み込むだけでは安定な磁気浮上は実現できなかった。
ここが限界かと諦めかけたとき、時間遅れ補償の係数を調整することで、磁気支持電流が低減されることに気が付き、その係数を実験的に最適化することで毎分6万回転までの加速と安定な浮上回転を実現することに成功した。
この他にも、100キロワットコンプレッサー用ベアリングレスモーター、ヒートポンプ用毎分10万回転ベアリングレスモーター、半導体製造装置用ベアリングレスモーターなどの研究開発を行っている。今後はこれまでの経験とノウハウを生かして、ベアリングレスモーターの実用化に向けた研究開発を加速度的に進めていく。
