-
業種・地域から探す

続きの記事![]()
工作機械産業
産業用ロボットによる機械加工を目的とした軌跡生成
-

明治大学 理工学部 機械工学科 専任講師 田島 真吾
【執筆】明治大学 理工学部 機械工学科 専任講師 田島 真吾
近年、産業用ロボットはその柔軟性と低コスト性により、組み立て・搬送作業のみならず機械加工への応用が進められている。しかし工作機械と比較して剛性や位置決め精度が低く、高速・高精度な加工を実現するには課題が多い。ここでは、産業用ロボットの軌跡制御技術の最適化に着目し①工具軌跡補間の最適化②冗長自由度を活用した姿勢制御③振動抑制のための速度プロファイル生成-の三つの手法を紹介する。これらの技術でロボットの加工精度向上を図り、機械加工への適用可能性の拡大を目指す。
はじめに
従来の多軸制御工作機械では、大型加工対象物(ワーク)の加工や変種変量生産への対応が難しく、より柔軟な加工システムの実現が求められている。こうした課題の解決策の一つとして、産業用ロボットの機械加工への応用が注目され、近年、研究が進められている。
6軸垂直多関節の産業用ロボットは、多軸制御工作機械と比較して作業領域が広く、設置が容易であり、コスト面でも優位性を持つため、多様な加工形態への適用可能性を持っている。しかし、産業用ロボットを機械加工に適用するには、剛性や位置決め精度の向上が不可欠であり、従来の制御技術の見直しが求められている。
産業用ロボットによる機械加工の実現に向け、①ロボット手先の位置指令軌跡の最適化②冗長自由度を活用した位置決め精度の向上③ロボットの姿勢を考慮した速度プロファイルの生成-の三つの研究を行った。これらの技術を統合することで、ロボットの加工精度を向上させ、産業用ロボットが工作機械と並ぶ加工システムの一翼を担うことを目指す。
ロボット手先の位置指令軌跡生成法
産業用ロボットによる機械加工において、作業空間での正確な工具軌跡の生成は、加工精度を左右する重要な要素である。しかし、産業用ロボットは回転関節により構成されているため、作業空間での手先動作と、関節空間での関節動作間に非線形な関係が存在する。そのため、従来の工作機械で広く用いられている関節空間での線形補間を適用すると、作業空間での工具軌跡が意図した通りにならず、加工面の品質が低下するという問題が生じる。特に、高速かつ高精度な加工を実現するには、作業空間での線形補間と、コーナー部における滑らかな軌跡生成が求められる。
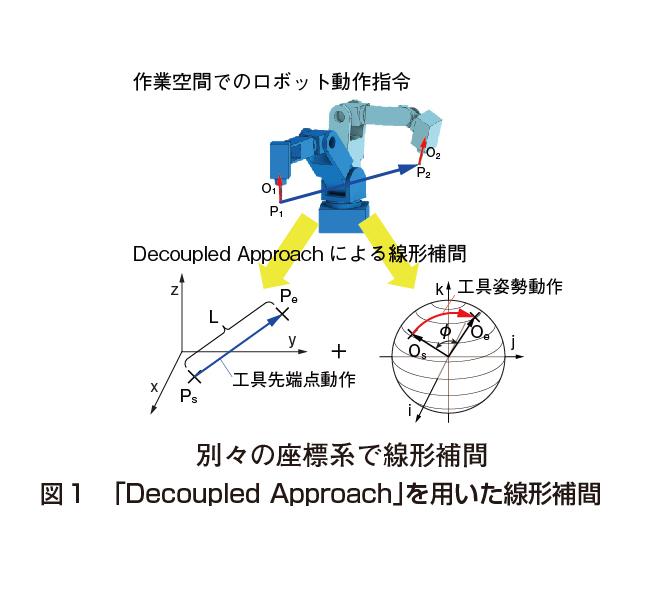
そこで、産業用ロボットの手先軌跡の精度向上を目的とし、新たな軌跡生成アルゴリズムを提案した。本手法では「Decoupled Approach(デカップルド・アプローチ)」を用いて位置指令と姿勢指令を分離し、作業空間における線形補間を実現する(図1)。
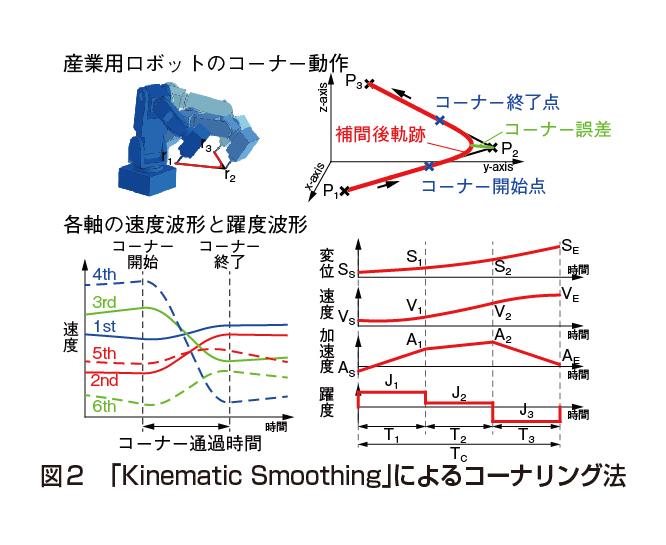
具体的には、位置指令を直交座標系、姿勢指令を球面座標系に分けて別々に取り扱うことで、作業空間での直線補間を可能にした。また、コーナー部では新たに開発した「Kinematic Smoothing(キネマティック・スムージング)」によるコーナリング法を適用することで、滑らかで連続的な軌跡を生成する(図2)。
この提案法では、関節空間においてコーナー部の軌跡を3分割し、それぞれの区間で躍度(加加速度)を一定とする軌跡プロファイルを適用することで、鋭いコーナーを滑らかな曲線に置き換える。さらに、コーナー部で発生する誤差はコーナー通過時間を調整することで制御可能である。本提案法により、作業空間では直線軌跡を維持しつつ、コーナー部では過度な速度変動を抑えながらスムーズな動作を実現した。
位置決め精度向上のための冗長関節最適化制御
産業用ロボットを機械加工に適用する際には、剛性と位置決め精度の確保が重要な課題となる。6軸垂直多関節ロボットは多軸制御工作機械と比較して広い作業領域、設置の容易さ、低コストといった利点を持つが、剛性や位置決め精度が低いため、加工時の姿勢を適切に維持することが難しいという問題がある。特に外力や振動による影響を受けやすく、加工精度の劣化を招くため、加工中のロボット姿勢を最適化する制御手法が求められる。
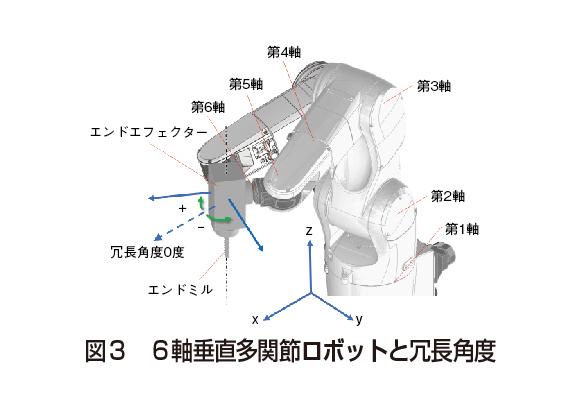
そこで、6軸垂直多関節ロボットの運動学的冗長性を活用し、ロボットの姿勢最適化による加工精度向上を目的とした経路生成法を提案した(図3)。
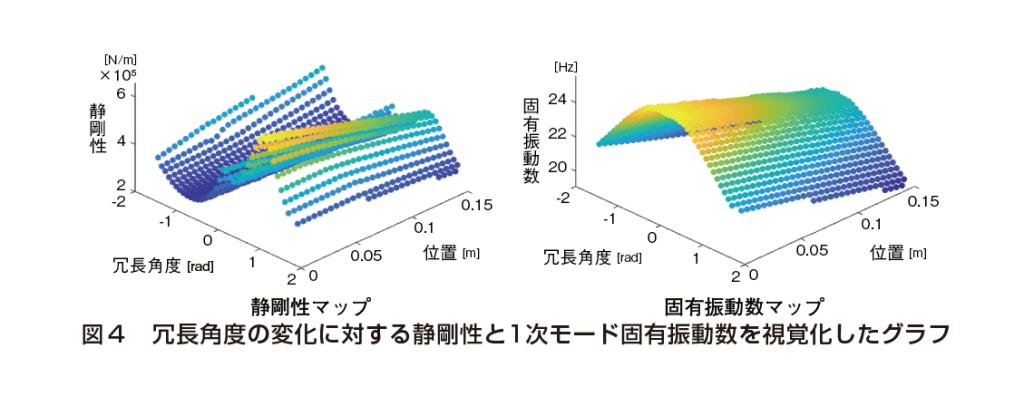
特に加工時に発生する静的および動的な外力による位置決め誤差の低減を図るため、ロボットの静剛性と動特性を同時に考慮した冗長関節の軌跡生成法を開発した。
ロボットの姿勢と剛性の関係を解析し、静剛性マップと固有振動数マップの2種類の指標を用いて、最適な冗長関節の角度を決定する(図4)。
これにより、加工条件に応じたロボットの姿勢最適化が可能となる。また、静的な位置決め誤差の低減と動的な振動抑制の優先度を調整できる重み係数を導入し、目的に応じた姿勢制御も可能にした。
ロボットの姿勢を考慮した速度プロファイル生成法
産業用ロボットの固有振動数は姿勢によって変化するため、ロボット機体の振動抑制が難しい。加工時の残留振動が増加することで加工精度の低下やサイクルタイムの増加といった問題が発生する。特に、高精度な機械加工を実現するためには、ロボットの姿勢に依存した振動特性を考慮した適切な速度プロファイルの生成が求められる。
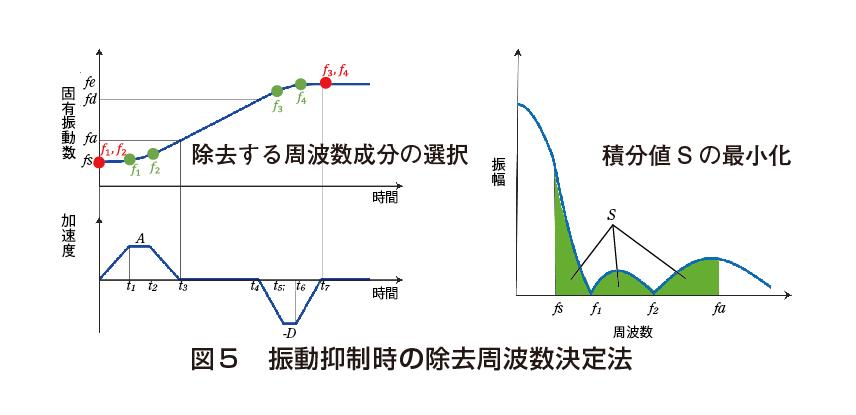
そこで、姿勢に依存した固有振動数の変動を考慮した振動抑制を目的とする新たな速度プロファイル生成手法を提案した。まず、加速時および減速時に異なる周波数成分を除去するため、有限インパルス応答(FIR=ファイナイト・インパルス・レスポンス)フィルタリングと、躍度制限加速度プロファイル(JLAP=ジャーク・リミテッド・アクセラレーション・プロファイル)を適用し、速度プロファイルを生成する。これにより加工時のロボットの動的特性を最適化し、振動の影響を低減できる。
さらに、振動抑制のために除去すべき周波数成分を決定するため、動作開始時と終了時の固有振動数を考慮する手法と、加速度の振幅積分値が最小となる周波数を除去する手法を提案した(図5)。特に、加速時には振幅積分値を最小化する周波数を、減速時には動作終了時の固有振動数を考慮することで、最適な速度プロファイルが生成可能なことを確認した。
まとめ
ここでは産業用ロボットを用いた機械加工の課題と、それを解決するための軌跡制御技術について述べた。具体的な研究成果として①位置指令軌跡生成法②姿勢最適化制御法③速度プロファイル生成法-を紹介した。これらの成果により、産業用ロボットによる高精度な機械加工の実現に向けた一歩となる制御技術が示された。
今後は実機を用いた実験的な検証を進め、さらなる精度向上と実用化に向けた研究を深化させていく予定である。