-
業種・地域から探す

続きの記事![]()
2025国際ロボット展
多脚ロボットの開発と歩行制御の研究
【執筆】 南山大学 理工学部 教授 稲垣 伸吉
サービスロボットの需要増加に伴い、多脚ロボットは不整地での高い適応力と安定性を生かして産業分野での利用が進展している。特に6脚ロボットは運搬や故障時の安定性に優れ、農業やインフラ点検などの現場で活用が期待されている。また新たな歩行制御技術の開発も進められている。ここでは6脚ロボットの研究事例や、進化する4脚ロボットの主要技術であるアクチュエーターとAI(人工知能)技術、そして6脚ロボットの今後の研究課題について解説する。
多用途ロボットと脚移動ロボット
サービスロボット市場は今後も拡大が見込まれており、米マッキンゼー・アンド・カンパニーが6月に発表した「Will embodied AI create robotic coworkers?」によると、2040年には多用途ロボットの世界市場規模が約3700億ドルに達する可能性がある。ここでいう多用途ロボットとは、あらゆる作業をこなす万能型ではなく、特定のサービスに特化した多品種・少量生産のロボットを指す。
こうした多様なロボットに共通する基盤技術の一つが「移動機構」だ。特に脚を使って移動するロボットは「脚移動ロボット」と呼ばれ、車輪型と異なり地面との接地位置を柔軟に選べるため、不整地でも高い適応力を発揮する。ロボットの脚数は用途や環境に応じて設計され、2脚は人間の生活空間に適し、4脚は未整備地での迅速な移動に優れる。
一般的に4脚以上の脚を持つものを「多脚ロボット」と呼び、6脚ロボットは4脚よりも重い物の運搬や高い安定性、複雑な地形への対応力が期待される。また脚を一部失っても歩行可能な耐故障性や、脚を作業用アームとして活用できる運動の多様性も大きな利点となる。一方で、6脚ロボットは潜在的能力は高いものの、技術的には4脚ロボットが一歩も二歩も先に進んでいるのが現状である。
6脚ロボットと歩行制御の研究事例

新明工業、名古屋大学、南山大学の研究グループは20年度から6脚ロボットの研究開発を進めてきた。主な用途は農場での搬送作業やインフラ点検であり、30年度以降の本格導入を目指している(図1)。6脚ロボットの歩行制御は脚の数が多いほど各脚の接地位置や動作順序の組み合わせが増え、制御が複雑になるという課題がある。
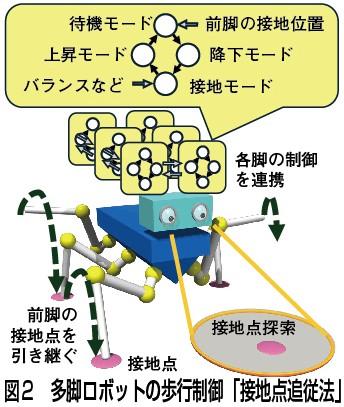
そこで本研究グループは「接地点追従法」と呼ばれる新しい歩行制御アルゴリズムを開発した(図2)。この方法では、各脚が前方の脚の接地点を追従して接地することで、接地点を前方から後方へと順次引き継いでいく。これにより、すべての脚で接地点を個別に探索する必要がなく、最前脚の接地点を適切に決めるだけで済む。
各脚は胴体のバランスを考慮しつつ自動的に遊脚動作を行うため、アルゴリズム自体は比較的単純でありながら、不整地にも適用可能だ。また追従する脚を切り替えることで進行方向の変更や旋回ができ、故障した脚や作業用に使う脚を追従リストから除外することで、即座に6脚から5脚、4脚歩行へと切り替えられる。
実証試験では6脚ロボットとして世界トップレベルの制御性能を実現した。現在はさらなる運動性能向上を目指し、発展が著しい4脚ロボットの技術も取り入れながら研究開発を続けている。
脚移動ロボットのキーテクノロジー
昨今の4脚ロボットの発展にはさまざまな要素技術の進歩が関わっている。ここではハードウエアとソフトウエアについて、1点ずつキーテクノロジーを説明する。
【1】大出力QDDアクチュエーター
アクチュエーターはロボットの重要な部品である。運動性能を左右し、その質量やコストもロボット全体の大部分を占める。そのため、アクチュエーターの選定はロボット設計の要となる。脚移動型ロボットのアクチュエーターには高いトルクと回転速度、さらに外部からの力に応じて剛性を調整できるバックドライバビリティーが求められる。
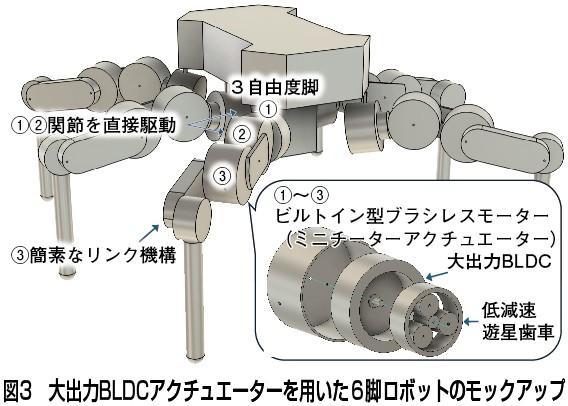
近年では「大出力」のブラシレス直流(BLDC)モーターと、低減速比の遊星歯車減速機を組み合わせた「準ダイレクトドライブ(QDD)」方式のアクチュエーターが多くのロボットに採用されている(図3)。この方式は構造がシンプルで、頑丈かつコンパクトにできるという利点があり、結果的にロボットの構造も簡素にできる。
こうしたアクチュエーターの供給は中国企業が多く担っており、中国における4脚ロボット技術の急速な発展の後押しとなっている。中国では大出力QDDアクチュエーターが安価に供給されており、国産で対抗するには高信頼化、長寿命化、小型化、軽量化、サポート体制の充実化などの付加価値が必要であろう。
【2】フィジカルAI
ソフトウエア分野ではフィジカルAIの進化が著しく進んでいる。フィジカルAIとは、現実世界の物理的な情報をもとにロボットやドローン、自動運転車などをAI技術で制御する仕組みを指す。特に「深層強化学習」はフィジカルAIの中核を担う。
強化学習は試行錯誤を通じて、将来的により高い価値が得られるような行動方策(ポリシー)を学ぶ手順である。深層強化学習では、行動方策とその価値をディープニューラルネットワークを用いて学習する。
15年には英グーグル・ディープマインドの囲碁AI「AlphaGo(アルファ碁)」がヨーロッパ王者を破り、深層強化学習の有効性が広く認知された。アルファ碁は囲碁の盤面を試行錯誤しながら学習したが、ロボット分野ではロボットが移動する環境内で動作を繰り返し学ぶ。
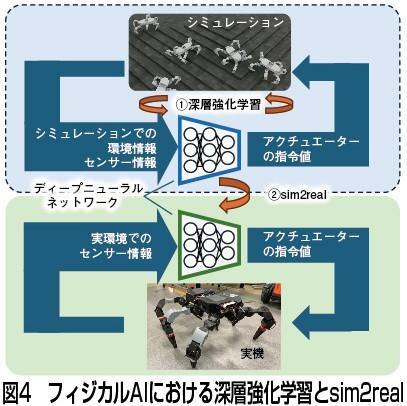
こうした試行錯誤は膨大な回数が必要となるため、実際のロボットではなくシミュレーション環境で行われる(図4)。数百から数千台規模のロボットを仮想空間で並列に動かし、効率的に学習させる。そして、シミュレーションで得られたニューラルネットワークをほぼそのまま実機に適用する手法を「sim2real(シム・トゥ・リアル)」と呼ぶ。
特に、大出力QDDアクチュエーターを搭載したロボットは、シミュレーション通りの動作を実現しやすく、シム・トゥ・リアルの適用が進んでいる。アクチュエーターとフィジカルAIの相乗効果によって、近年の4脚ロボットの性能向上が実現している。
6脚ロボットの研究開発の方向性
6脚ロボットにおいても、前述のアクチュエーター技術やAI技術を導入することにより、多用途ロボットの新たな選択肢として産業へ貢献するものと考えられる。課題としては、ハードウエアについては6脚ロボットに適したアクチュエーターや脚や胴体の構造設計などが挙げられる。深層強化学習においては、6脚ならではの自由度の高さに対抗する学習効率の改善が挙げられる。
またロボットの用途や運用環境によっては、従来の接地点追従法などの制御法と深層強化学習を組み合わせることで、より柔軟で高性能な制御が可能になると考えられる。多用途ロボットはインフラ施設の保守や点検など、社会の重要な場面での活用が期待されており、用途に応じたカスタマイズも必要となる。
安全・安心の観点からも、国産多用途ロボットの発展は必要であり、6脚ロボットのような新しい移動プラットフォームの研究開発は、今後ますます重要になる。

