-
業種・地域から探す

続きの記事![]()
2025国際ロボット展
AIが着やすい産業用ロボット実現のための制御技術
【執筆】 長岡技術科学大学 電気電子情報系 准教授 横倉 勇希
昨今のAI(人工知能)ブームとそれに便乗した産業用ロボットの制御技術には決定的に不足している能力がある。それは「力制御」の性能である。産業用ロボットに限らないが大多数のロボットは基本的に位置制御で動作しており、例えば関節に搭載されたエンコーダーからの位置情報と、AIなどの上位系から指示された位置指令との差をゼロに制御される。軌跡追従制御など長年の位置制御技術の蓄積により、位置制御としての高速応答性やロバスト(堅ろう)性は飛躍的に向上してきた。しかし力制御は相対的におろそかになっているのが現状で、いまだに産業用ロボットが人間の作業者の完全な代替とならないことへの直接的要因となっている。ここでは、代表的な力制御の課題とその解決に向けた研究開発の一部を紹介する。
力制御の難しさと課題
人間が普段何げなく行っている手作業は、手先位置・姿勢と力加減の両方を絶え間なく調節することで実現している。研磨作業を例として考えた場合、加工対象物(ワーク)の接触面に対して接線方向に「位置制御」を、法線方向に「力制御」を同時に実行する作業と言い換えられる。
しかし従来の産業用ロボットは位置制御は得意としているものの力制御を苦手としているため、手先軸にツールを搭載して人間と同等レベルの繊細な研磨作業を行うのが困難な現実がある。ここではまず力制御の難しさについて説明する。少し専門的な内容も含むがご容赦願えればと思う。
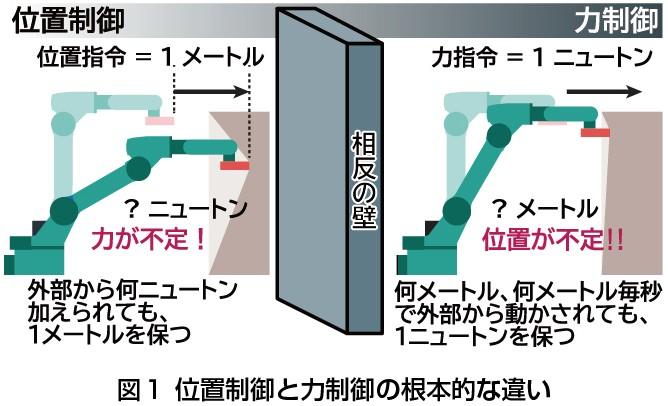
図1に示すように、位置制御の場合は外力が何ニュートン加わっても指令された位置を保つように動作し、位置制御ゲインを高めれば高めるほど、すなわち位置制御性能を向上させればさせるほど、外力に打ち勝つように動く。反対に力制御の場合は外部から何メートル、もしくは何メートル毎秒で動かされても常に指令された力を保つようにロボットが動き、力制御ゲインを高めれば高めるほど、すなわち力制御性能の向上に伴って外力に負けるように動く。
ロボットを外から触ると、前者では「硬い」感触となり、後者では「柔らかい」感触となる。全く相反する性質を持つため、位置制御に特化した産業用ロボットは本質的に力制御が実現不能になる。
力制御系を構成するには
「いやいや、力覚センサーを搭載して、その力検出を位置制御系に入力すれば、力制御なんて簡単なのでは?」と考える人も多いが、力検出を位置指令に変換する際に仮想的な質量・バネ・ダンパー系の逆数を設定する必要があり、それは純粋な力制御とはならず、専門的には「アドミッタンス制御」と呼ばれるものになる。
もしロボットを0ニュートンに近い接触力で動かそうとすると、そのときの仮想バネ定数の逆数は無限に近づき実装できない。また制御ループ内のアドミッタンス制御器は、低い周波数しか通さないフィルターのように働くため、位相が遅れて発振しやすくなり、高速応答性は得られず力制御性能は著しく低下する。
この問題への対処は単純で、ロボットコントローラー内部の位置制御ループを完全に取り去り、電流制御系やトルク制御系をむき出しにしてから力制御系を構成することである。しかし多くのロボットコントローラーはそのような構成ができない。そのため、筆者の研究室では付属の市販品は使わずに倉庫行きとなり、代わりに「Advanced Robot Control System V6(ARCS6)」と呼ばれるモーションコントロールフレームワークと、制御ハードウエアを独自開発することで解決している。
加えて、制御器設計の考え方も位置制御とは異なり、力制御ではワークの機械インピーダンス(交流信号の流れにくさ量)も加味しなければ制御系がそもそも成立しないため、力制御に特化したシステム同定と制御理論も必須となる。
位置制御と力制御を両立/加速度制御
とはいえ力制御だけできても研磨作業はできず、ワーク表面に合わせた位置制御も必要だ。そこで、それぞれ相反する性質を持つ位置制御と力制御を統一して扱う制御手法が求められ、その答えの一つとして「加速度制御」がある。ロボットを所望の加速度に従わせる加速度制御を内部ループとして実装した上で適切な加速度指令を与えると、ロボットが自然に持つ積分特性により指定した位置に移動できるため、位置を制御できる。
一方で、発生させたい接触力の値を質量(慣性)の逆数を乗じて加速度指令とすれば力を制御できる。従って、加速度を基準とすれば位置と力の双方を統一して制御できることになり、その礎の技術として「外乱オブザーバー」がある。
外乱オブザーバーはモーター電流と速度から外乱を推定する手法だ。モーター慣性以外の要素をすべて外乱として定義し、補償分の電流を流すと、ロバストに加速度制御ができる。その外側に位置制御と力制御のループを追加すれば「位置/力ハイブリッド制御系」が容易に構成可能である。
共振振動抑制による高速でロバストな加速度制御の実現
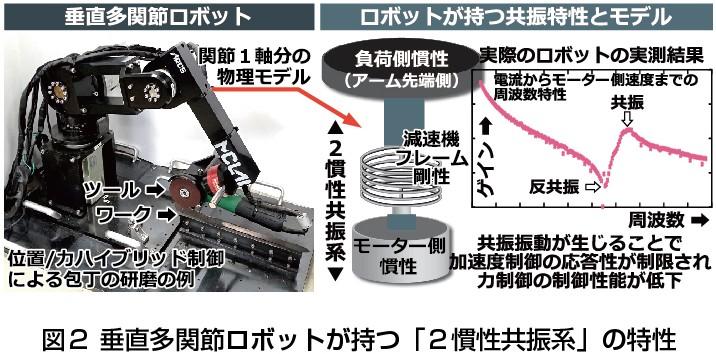
しかし産業用ロボットへのロバスト加速度制御の適用はそう甘くはなく、ロボットが持つ機械的な共振振動に悩まされることになる。図2に示すように、特に垂直多関節ロボットはモーター側慣性と先端負荷側慣性の間に減速機の弾性特性とフレーム剛性が挟まった構造を持ち、「2慣性共振系」と呼ばれるシステムとなるので、大きな加速度次元の振動を誘発する問題が起きる。
そこで筆者の研究グループでは「負荷側加速度制御」を提案しており、その2慣性共振系を制御的に単慣性化する(剛体系に制御で作り替える)ことで、ロボット先端負荷側の加速度を振動なく高速かつロバストに制御する手法を開発している。
また減速機自体にも「角度伝達誤差」と呼ばれる歯形状に起因する振動要素があり、特に低速域で加速度が不安定になる問題もある。そこで、ひずみ波を外乱と定義した状態外乱オブザーバーを用いて角度伝達誤差を推定して抑え込み、滑らかな加速度応答を得る制御手法も併用する。
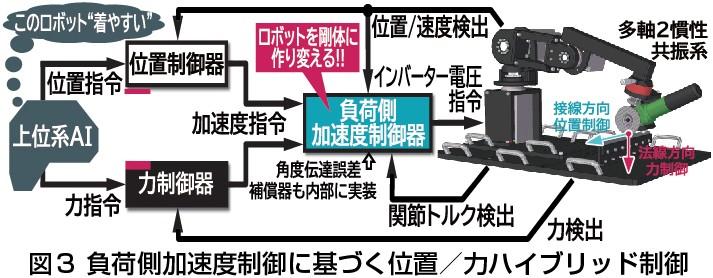
最終的に、図3に示すように角度伝達誤差補償法と負荷側加速度制御に基づいて、位置/力ハイブリッド制御を実装することで、位置制御性能も力制御性能もどちらも劇的に向上でき、任意物体への接触を伴う手作業の自動化に役立つ。
はやりのAIとの親和性も高く、ロボットの詳細なダイナミクスを知らない上位系AIからの位置指令と力指令を即座に忠実に追従可能になるため、AI駆動ロボットの運動性能向上につながる。つまり「AIが着やすい産業用ロボット(=AIから見て動かしやすい産業用ロボット)」を実現できる。
現在は社会実装に向けて、新潟県内で生産される洋食器や工具、包丁などの金物の研削研磨工程の自動化を目指している。負荷側加速度制御をベースに、人間と同等レベルの繊細な手先位置と力加減の両方を教示・再生できる「位置/力ハイブリッド動作模擬」の研究開発を進めている段階にあり、省人化に基づく地方創生の一助になればと考えている。

