-
業種・地域から探す

続きの記事![]()
2025国際ロボット展
人の作業支援における自律型ロボットの向かうべき道
【執筆】 東北大学大学院 工学研究科 ロボティクス専攻 教授 山崎 公俊
基盤モデルの発展や人型ロボット開発の加速などにより、自律型ロボットの活用は現在極めてホットな話題である。ただ、それに比例して過度な期待を受けており、行く先が見えにくい状況になっている。ここでは筆者なりの現状の捉え方を述べるとともに、生活支援や製品製造などの作業を想定した場合、自律型ロボットにどのような活路があるのかを考える。
人間が行っている作業を自動機械に代替させることへの期待がさらに高まっている。人型ロボットが自在に動く映像やエンボディドAI(身体性を持つ人工知能)にまつわるニュースを毎日のように見ていれば、そのような期待が醸成されることは当然だろう。
実際、製品製造や物品管理などにおける多自由度ロボットの活用が進み、現場に大量の人型ロボットを導入する試みも多く見られるようになった。これを踏まえ、筆者の立場から今後の自律型ロボットが向かうべき方向について考えてみたい。
筆者の専門分野
筆者は知能ロボティクスの分野で約25年の研究経験がある。研究成果を社会へ還元するための活動としては、主に生活支援や製品製造を対象フィールドとして、自律型ロボットに関する提案をしてきた。
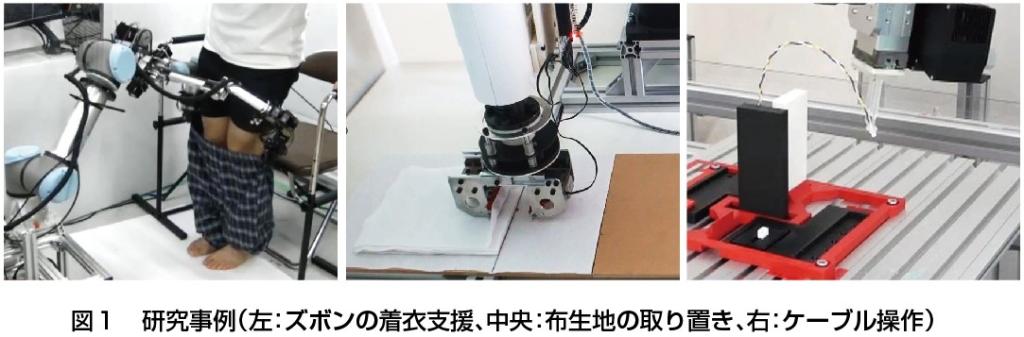
特に注力しているテーマは二つあり、一つは柔軟物の操作だ。例えば、家電などの製造におけるケーブル操作の自動化や(図1右)、布生地の取り置き(図1中央)、着衣支援(図1左)などがある。
もう一つはモバイルマニピュレーションだ。移動台車の上にロボットアームを搭載した構造のロボットを対象として、自律性および効率性を向上させるための動作生成手法を主な研究課題としている。例えば、動作生成処理の高速化、誤差に頑強な行動探索、タスクレベルと動作レベルの同時計画などがある。
この二つのテーマには共通項がないように見えるかもしれない。しかし筆者は、両方とも「オープンプロブレム」の色合いが極めて濃いテーマであると考えている。柔軟物の操作に関して言えば、柔らかく変形する対象は取りうる状態が無限である。それゆえに形態や機械的特性が既知のものと異なる場合、状態推定に無視できない齟齬(そご)が発生しうるので、ロボットにはかなりの臨機応変さが求められる。
一方、モバイルマニピュレーションに関して言えば、空間を自由に移動できることにより、対面しうる環境や操作しうる対象物が無限になる。これらを恣意(しい)的に絞り込めばロボットは比較的簡単に動くが、それでは実用の場が大きく制限される。筆者はこれら二つのテーマに関し、自律型ロボットができることを増やすべく、研究を進めている。
基盤モデルへの期待と懸念
前述の経験を持つ立場から見て、現在の自律型ロボットの技術は転換点にあると感じる。短い文言で表現すれば「人の知的行動能力を直接的にロボットへ移す方式がいよいよ実になってきた」といったところである。これは、大規模言語モデルに代表されるような基盤モデルが市民権を得るに伴い、ロボットの知能システムを構築する方法が大きく変わってきているためである。
基盤モデルは筆者の自律型ロボットに対する見方にも影響を与えた。これまでは自律型ロボットを「プログラムで書いた通りに動く」ことを前提とした自動機械の一種と捉え、ロボットの作業能力が開発者の実装能力(人間の一部の知的機能を計算機に移す能力)を超えることはないと考えていた。統計的機械学習を導入する場合であっても、それが特定の問題を解く装置という位置付けである限り、考えは同じだった。
一方で基盤モデルを活用しているロボットは、使用者の観点からすると「膨大な知識に基づいて行動を生成することができる自律的な個体」である。行動の熟度はいったん置いておくとしても、人間と同質の存在とみなすほうが実態に合っている。今後うまく発展させられれば、前述したオープンプロブレムをいくつも解決してくれる知能システムの実現に貢献するだろう。
ただし、現時点では懸念も多い。基盤モデルはロボット開発者にとって大きなブラックボックスである。そのうえ、思い通りの出力を示してくれることはあっても、常に我々が得たい答えをくれるものではない。つまり、多様な指令を許容し、かつ指令の生成方法が汎化(はんか)された一方で、得られるロボットの行動は指令者が期待する解の範囲からはみ出すことが多く、かなり不確実である。この不確実の広がりをいかに狭め、許容範囲に納まるようにするかが目下の課題であろう。
ロボットの実用に向けた方向性
基盤モデルの登場からしばらく経つが、その活用については依然注目されており、産学ともに多くのリソースが投入されている。前述したように混沌(こんとん)とした状況はあろうとも、ロボットへの適切な指令方法などは引き続き整理されていくだろう。それを前提として、行動の信頼性が求められる現場でロボットをどう活用していくかを考えてみたい。
筆者個人の意見としては、作業場での主なプレーヤーはロボットとしつつも、プレイングマネージャー的な立場で人間の介入を積極的に許す仕組みをしっかり作るのが良い。一つのキーワードはShared Autonomy(シェアード・オートノミー、共有自律)である。この言葉は、ロボティクスではこれまで遠隔操作などの文脈で用いられてきたが、自律型ロボットの存在が変質しつつある今、より広い意味で捉え直してもよいと思う。
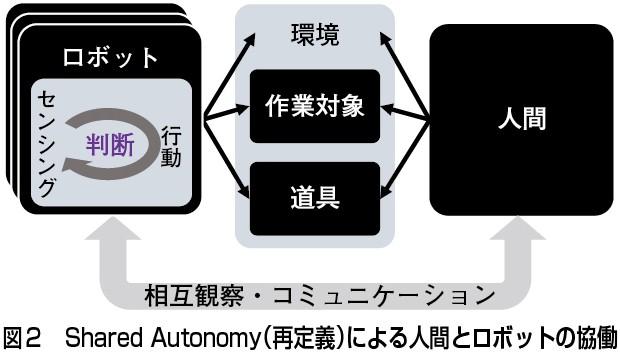
例えば、図2に示すように人間とロボット群がコミュニケーションを取れるようにしておき、必要な指示を人間から与え、作業目的に対して相応な行動が取れているかをロボット群から人間に説明・確認できるようにする。これをもって人間とロボットが協働し、人間1人当たりの生産能力を増強する。
もう一つ、あまり大きな問題を一度に解こうとしないことも大切だろう。これまでにもAIやロボティクスで見られた現象であるが、現状は新しい技術に対して過剰な期待が寄せられてしまい、明らかな過熱状態にある。また、ここでは触れなかったが、生活支援や製品製造を想定したとき、最近世間をにぎわせているような人型ロボットは明らかに身体的能力が不足している。
このことと行動の不確実性の理解に努めたうえで、求解可能な部分問題を見つけ、その範囲で適切に機能する仕組みを構築していくことが重要である。普及という観点では、人間のようにたまに失敗するロボットに対し、肝要さを持って受け止められるシステムづくりや人心も必須だろう。

