-
業種・地域から探す

続きの記事![]()
建設産業
最先端技術で省人化・自動化へ取り組む ゼネコン最新技術
建設業界は現在、国土強靱化(きょうじんか)に向けたインフラの整備や堅調に推移する民間投資の需要などを背景に、好業績が続いている。一方で、担い手不足や資材価格の高騰、長時間労働、2024年4月に適用が始まった時間外労働の上限規制などの課題に直面しており、抜本的な対策に迫られている。こうした状況を打開するには一層の生産性向上が不可欠で、各社は最先端技術を活用した省人化や自動化の取り組みを加速している。
鹿島/コンクリ吹き付け・支保工建て込み 山岳トンネル自動施工
-

「エレクタ付き2ノズル自動吹付け機」の全景
鹿島は山岳トンネル自動化施工システムにおいて、コンクリートの吹き付けと支保工の建て込み作業の自動化・遠隔技術を搭載した「エレクタ付き2ノズル自動吹付け機」を横浜高速鉄道(横浜市中区)発注の「みなとみらい21線車両留置場建設工事(土木工事)」に導入した。
単純な単心円形状の掘削断面だけではなく、馬蹄形や扁平断面などにも対応している自動吹き付けシステムと、事前に任意の断面形状における吹き付けと建て込み動作を検証できるシミュレーターを使って吹き付け動作を最適化した。従来のシステムに比べて、適用が可能なトンネル形状の種類が大幅に拡大する。
支保工の建て込み作業では、建て込みガイダンスシステムの適用に加えて、高強度吹き付けコンクリートの採用により金網の設置作業を不要とした。吹き付け・建て込み作業において、人が切羽近傍に立ち入ることなく、肌落ち災害の危険がない安全な作業環境を実現できる。
今後、他の山岳トンネル工事でも同システムを搭載した自動吹き付け機の導入を推進。安全性と生産性の一層の向上を図る。
大林組/火薬装填 無人化 50メートル離れ1人でロボ操作
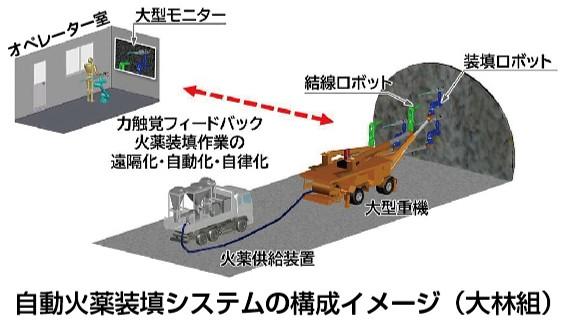
大林組は慶応義塾大学ハプティクス研究センターと共同で、力触覚を再現する技術「リアルハプティクス」の応用により、切羽直下での火薬装填作業の無人化を実現した。自動火薬装填システムに、起爆用爆薬の供給装置を搭載。従来は5人で行っていた装填作業を、切羽から50メートル離れた場所にいながら1人で実施でき、安全性向上と省人化を図れる。
大型重機で装填ロボットを装薬孔の近くに移動させた後、切羽から離れたオペレーター室で装薬孔周辺の映像をモニターで確認しながら遠隔で火薬を装填する仕組み。リアルハプティクスによって装填ロボットの力触覚が作業者に伝わるため、あたかも切羽で直接作業しているかのような直感的な作業が可能だ。
起爆用爆薬の供給装置の搭載によって火薬の供給を機械化し、装填ロボットへ自動的に取り込める。またロボットアームの設置方法の工夫により装填範囲を拡大しており、切羽での装填作業の無人化を実現し、作業者1人による連続的な装填作業に成功した。両者は今後、複数台での装填などに取り組み、一連の技術の現場適用を目指す。
大成建設/シールドトンネル外周地盤 坑内から調査・可視化
-

「T—iGeoViewer」による試料採取と試験の実施(イメージ)
大成建設はシールドトンネル外周地盤の性状をトンネル坑内から安全・迅速に調査し、結果をリアルタイムに可視化できる調査技術「T—iGeoViewer」を開発した。大がかりな測定機器などを設置せずに、土質試料の採取や詳細な土質試験の実施が可能で、シールドトンネルの修繕・補強工事に適用できる。
計測装置の小型化により、都市部でも地表面に調査用地を確保する必要がなく、調査準備期間の短縮や作業負荷の軽減、コスト抑制を実現し、トンネル坑内から調査箇所の詳細な地盤情報を効率的に取得できる。独自開発の止水機構で地下水圧を制御し、トンネル坑内への地下水の流入を防止しながら調査するため、調査箇所での地盤の試料採取や原位置土質試験を安全・正確に実施できる。
また二重管サンプラーを用いて土質試料を採取し、電気式コーン貫入試験により支持力や間隙(かんげき)水圧などを連続測定。砂・粘土の土層構成や硬さなどの地盤物性を即時に把握し、リアルタイムに可視化する。水漏れ・損傷などの異常時の原因究明や、適切な対策工の検討に活用できる。
清水建設/鉄筋入り大型局面部材 高精度で自動造形
-
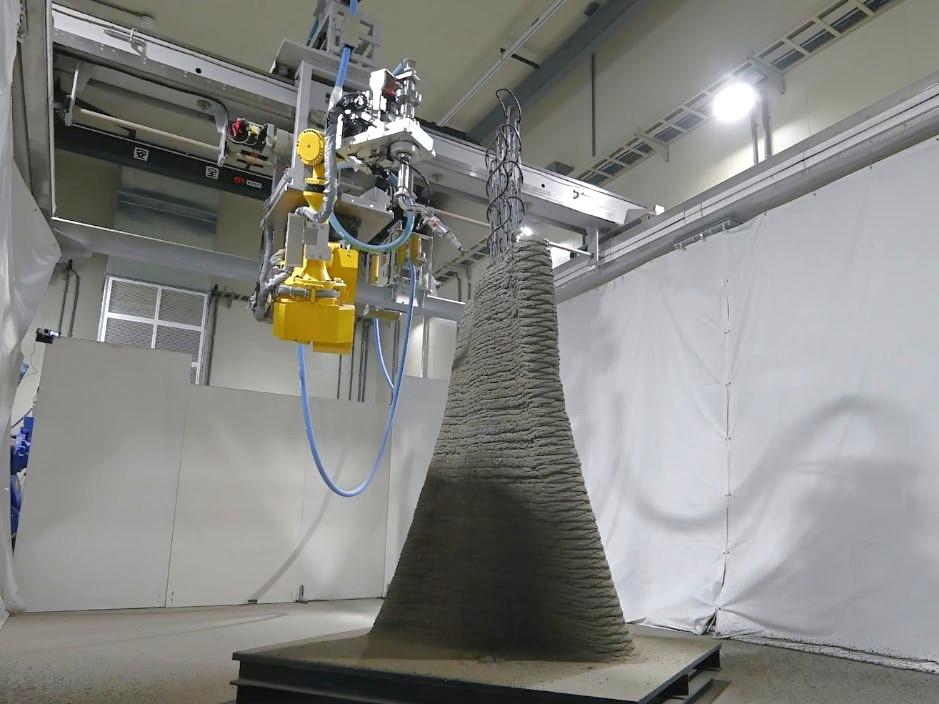
プリンティングに用いるガントリーロボット
清水建設は有筋の大型曲面部材の施工に対応した材料噴射型3Dコンクリートプリンティングシステムを開発した。セメント系材料を下方へ押し出しながら積層する材料押出型のプリンティングでは困難な鉄筋入りの構造部材や、複雑な形状の大型部材を高精度で自動造形できる。
9自由度のガントリーロボットと、噴射後の材料の挙動を事前検証できる噴射シミュレーターを組み合わせたシステム。
プリンティングに用いるガントリーロボットは、門型フレームの上部に配したXY方向・2軸の移動機構に7自由度のロボットアームを吊り下げるように接続した。
造形範囲は奥行き6メートル×幅4メートル×高さ3メートル。アーム先端のノズルから多方向かつ広範囲に材料を噴射し、配筋の内側まで充填できる。実証試験で、下層と上層が中心部から張り出したねじれ形状の曲面壁(高さ2・5メートル)を4時間で造形することに成功した。
生産年齢人口の減少が社会課題となる中、構造部材の3Dプリンティングを現場実装できれば施工の自動化・省人化に役立つ。構造物の意匠の自由度向上も期待できる。
竹中工務店/巡回ロボ自律移動 現場ルート高精度設定
-

四足歩行ロボットによる建設現場の巡回
竹中工務店は、空間上の位置を特定できる規格「空間ID」を活用した建設現場でのロボット運用システム「ロボットナビゲーションシステム」を開発した。3次元(3D)位置情報をもとにロボットの自律移動を実現。巡回作業などにおける高精度なルート設定が可能となる。
NTTドコモビジネス(東京都千代田区)、アスラテック(同港区)との共同開発。ロボットの走行計画の作成時に十分な走行可能スペースを確保できるかについて、施工状況と照らし合わせながら柔軟に計画できる。日々の工程に応じて変化する立ち入り禁止区域など走行可否判断が難しい現場で、高精度なルート計画や自律移動を実現できる。
移動空間に対しては、3D空間上の位置を指定できる空間IDを使用。屋内外や上下階をシームレスに自律移動し、異なる種類や複数台のロボットの同時運用を実現する。竹中工務店の建設現場で実証実験を行い、巡回作業の業務時間を約30%削減。空間IDをシステム間の共通言語に活用することでシステム開発コストも約30%削減できる。