-
業種・地域から探す

移動ロボット/高度化を支える測位技術
ロボットマニピュレーターが産業用ロボットとして工場内での製造に活用されてから半世紀以上がたつ。マニピュレーターは地上に固定され移動はかなわないが、近年、車輪で移動することのできるロボットが活用され始めている。ここでは移動ロボット技術の中でもっとも基礎的な測位技術について整理をし、視覚にも簡単に触れておきたい。
実用普及の入り口にある自律移動体
-
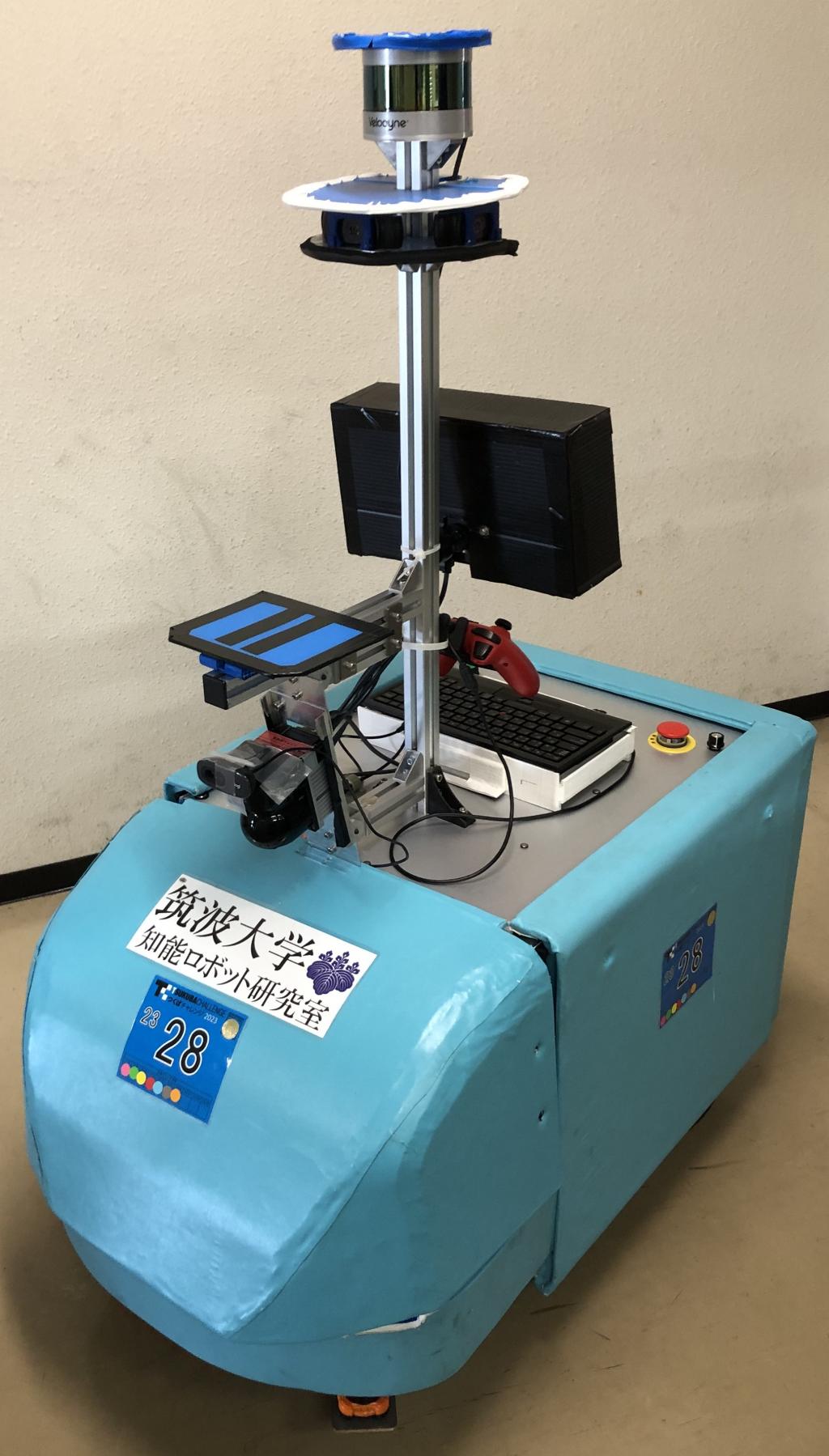
レーザースキャナーとビデオカメラを搭載した実験用自律移動ロボット「Kerberos」(筑波大学知能ロボット研究室)
ファミリーレストランやスーパーマーケットでは、サービスロボットとして稼働する自律移動ロボットをよく見かける。機械化や自動化への投資が積極的になり、労働生産性の向上も見込まれる。
運輸業界の2024年問題は、物流拠点・倉庫を介在にした中継輸送のシステム化も推し進める。物流拠点では、フォークリフトによる荷下ろし・荷積みの作業や、宅配便の地域拠点から個人宅までのラスト・ワン・マイルといわれる配達は不可欠である。
土木建設現場におけるパワーショベルなどの建機の自動運転化に向けた技術開発も盛んである。レベル4自動運転が可能な自家用車が日常的に利用できるのもそう遠くはないだろう。自律的に「動く」ロボット(写真)や運搬車、作業機械(以下、「自律移動体」と総称する)が基礎研究段階を超え、実用普及の入り口にあるといえる。
測位は自律移動体の基礎技術
自律移動体の基礎的な技術課題に、その自律移動体の自己位置の測定、すなわち「測位」技術がある。移動の始終点を与え、その地点間を移動することが求められる。配送ロボットなどの用途では、この始終点の候補は複数あり、これらを結ぶ経路も事前に計画できる。
移動中、自律移動体に備えた測位機能で、その経路上に自己位置があるかを頻回に確認し、経路と自己位置の間にずれがあれば、そのずれを解消する方向に舵(かじ)をきる。測位が基礎的な技術課題なのは、このような自律移動の実現に必要だからである。
自己位置は、一般にその移動環境に都合のよい場所に座標原点と座標系を決め、位置座標で表現する。その移動体の進行方向や姿勢は、その座標軸を基準にした方位で表す。
自律移動体は主に地上や床面上を移動することから、二つの座標軸からなる直交座標系を水平面に張るのが一般的であり、路面の高低差はあまり配慮しないことが多い。移動経路を直線や円弧などで接続し、これを設定された座標系に関して方程式で表現すると、測位した現在位置がその方程式を満足するか否かで正しい経路上にいるかどうかが容易に判定できる。
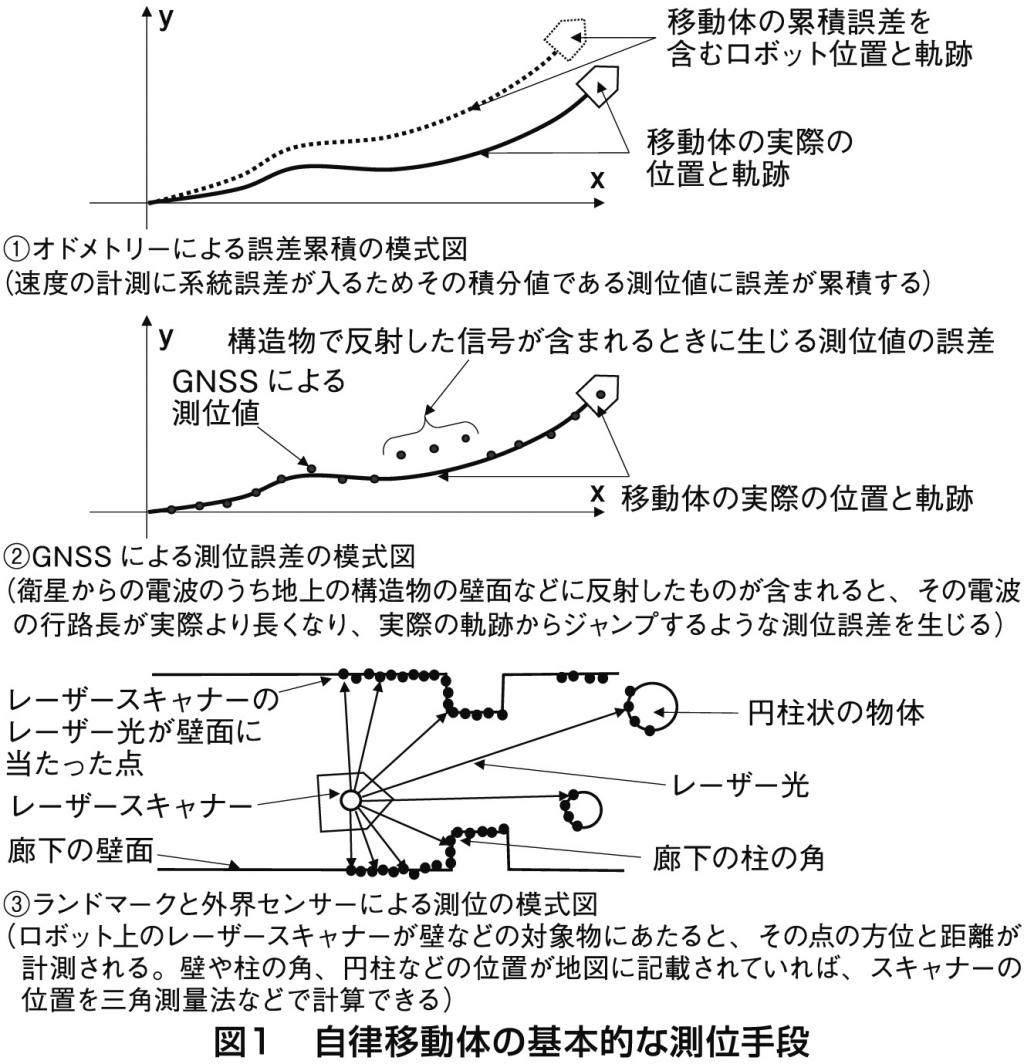
自律移動体の主要な測位手段を大別すると①デッドレコニング②全地球測位衛星システム(GNSS)による測位③センサーによるランドマーク検出と地図上にあるそのランドマークとの照合によるもの―に分類できる。
まず①のデッドレコニングは、左右2車輪の回転数を時々刻々計測して積分し、自己位置を得るオドメトリーや、移動体の回転角速度(方位角の時間微分値)をレートジャイロにより計測し、車輪による走行速度の計測とともに積分するジャイロドメトリーが代表例である。数ミリ秒ごとに測位値が得られ、自己位置を継続的に推定する手段として第一選択となる。速度計測の系統誤差の排除が困難なので、測位誤差が累積増大する性質がある(図1①)。
②では、多数の測位衛星を地球周回軌道に投入する。各衛星はその軌道上の位置とそこでの時刻を電波で放送する。地上では時計を持つ受信機で複数衛星からの電波を受信し、衛星からの電波の到達時間差を利用して測位地点と衛星までの距離を計算し、受信アンテナの現在位置を特定し測位を行う。QZSSは日本の、GPSは米国のGNSSの略称である。欧州やロシア、中国なども同様に運用している。各国の衛星の信号を同時に受信して測位計算する受信機も普及している。
地上にある建物などの壁面に反射した電波が強く受信されると、電波の行路長が長くなり無視できない測位誤差を生じる。1秒に1―2回の頻度で測位値を出力する受信機が多い(図1②)。
③は、①や②での測位に組み合わせて利用されることが多い。地上にある電柱や街路樹、柱の角、壁などの目印(ランドマーク)の位置が座標値として地図上に記載されており、その特定の目印が外界センサー(例えばレーザースキャナーやビデオカメラなど)と地図上でそれぞれ特定できれば、センサーからの見え方と地図上の座標値とから自律移動体の自己位置を特定できる(図1③)。
①や②で測位誤差を含む自己位置が得られていれば、その自己位置を頼りに検出した目印と地図中の目印の照合も容易になり、さらにその測位誤差を低減する計算も可能である。このような計算にはベイズ推定などの確率統計に基づく推論(例えば拡張カルマンフィルターなど)がよく利用される。
なお、技術的には外界センサーからの情報だけで地図の生成をしながら同時に現在位置も推定する、位置と地図の同時推定(SLAM)技術の研究開発も進んでおり、実用レベルに達しているものもある。
自律移動・自律作業のさらなる高度化に向けて
-
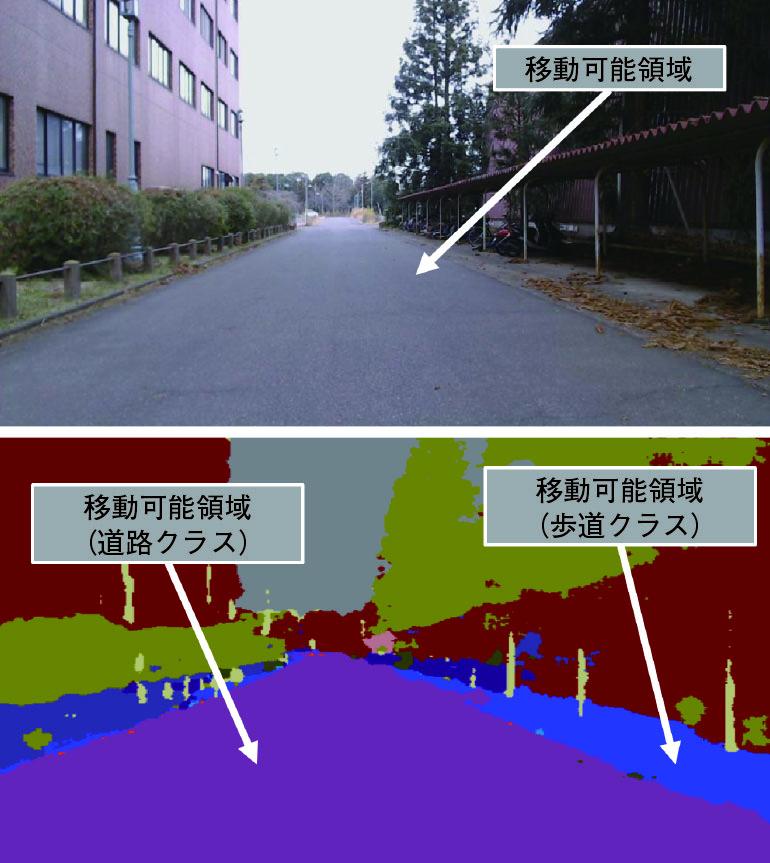
図2 セマンティックセグメンテーションの例
(上)建物と路面、街路樹の茂みのある画像
(下)セグメンテーション後の画像
あらかじめ学習されたクラスにそれぞれの領域が分類されている
(写真出典:半田旭、「幾何学的に正確な経路情報と走路認識に基づく自律移動ロボットのナビゲーション」筑波大学大学院博士課程システム情報工学研究科修士論文、2020年3月)
計算機の小型化や高速化により、ビデオカメラ画像に対してかなり高度な画像処理や認識が可能になった。スマートフォンの普及は大量生産効果を生み、高解像度で小型の撮像素子が安価に入手でき、レーザースキャナーだけでなく、ビデオカメラによる環境認識もさまざまな場面で実用の域に達してきている。地上の目印だけでなく、障害物の認識なども必要であり、解像度が高ければそれだけ遠方にある物体でも認識できるようになる。
撮像素子の高解像度化について、視野角が84度(光軸から左右にプラスマイナス42度)の視野範囲をいわゆる4Kの撮像素子で撮像すると、人間の目の視力に換算して0・8から0・9程度となるという報告がある。移動ロボットの視覚をビデオカメラで撮影して単眼で広視野を確保しながら遠方を視認しようとすると、4K撮像素子の普及により実用域に達した感がある。しかし、この撮像素子の画総数が900万画素程度になることから、もしビデオフレームレートである1秒間に30フレームの処理速度を達成しようとすると、計算負荷がまだ高く、計算機もかなり高性能なものを用意する必要がある。
一方、人工知能(AI)技術の応用による画像認識も盛んにおこなわれており、AI的な手法によるセマンティックセグメンテーションと呼ばれる手法も登場している。これは、画像内の物体がカバーする領域を、その領域に含まれる対象物の名前とともに分類する手法である(図2)。
今後は、このようなAI的手法による物体認識と、先に述べたオーソドックスな測位技術などを組み合わせて、自律移動体の高度化がなされていくものと考えられる。
【執筆】
筑波大学
システム情報系知能機能工学域 知能ロボット研究室
教授 坪内 孝司