-
業種・地域から探す

バリ取り・エッジ仕上げ
ロボットによる仕上げ作業の自動化
【執筆】 バリ取り・表面仕上げ・洗浄協会 理事長/関西大学 名誉教授 北嶋 弘一
-

バリ取り・表面仕上げ・洗浄協会 理事長/関西大学 名誉教授 北嶋 弘一
昨年12月に東京で世界最大規模の国際ロボット展が開催され、過去最多の出展数で15万人の来場者を集めた。「スマートプロダクションロボット」と「スマートコミュニティロボット」の2分野で構成され、AI(人工知能)技術を活用したヒューマノイドを含む、ロボット開発の本格化を象徴する展示会であった。バリ取り・エッジ仕上げの分野においても、自動化に向けた活発な提案がされている。ここではロボット導入の考え方を述べるとともに、バリ取り・表面仕上げ・洗浄(DSC)協会の活動について紹介する。
品質と性能を向上—付加価値高める
モノづくりの現場において、スキルが求められる労働力の不足や労働災害防止が課題となっている。これらの解決を目的として、さまざまな分野に普及しているのが、スマートプロダクションロボットである。
特に、バリ取り・エッジ仕上げを含む表面仕上げと洗浄の最終仕上げに関わる工程が、加工対象物(ワーク)の品質と性能を向上させて付加価値を高める重要なキーポイントになる。これらはスマートプロダクションロボットの活用による高効率化とともに、必須の要素技術である。
ロボット援用によるバリ取り・エッジ仕上げ作業の自動化を策定するには、ロボット自体の特性を把握することに始まる。6軸ロボットは三次元的動作が可能である。プログラムの準備によっては、ワーク用の固定治具あるいは把持具の交換のみで、形状の異なる部品への対応が可能になる。
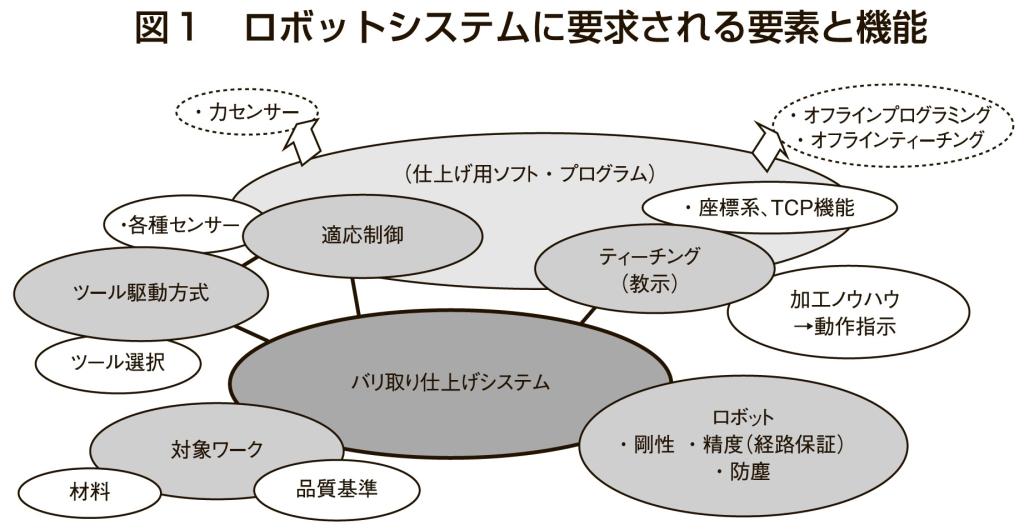
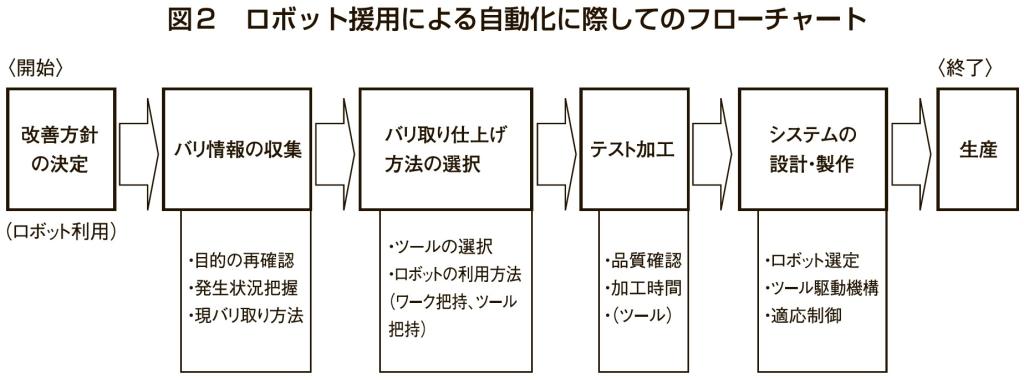
さらに、ロボット以外に図1に示すような、ロボットシステムに要求される要素と機能を十分に考慮した上で、図2のような手順に従ってバリ取り・エッジ仕上げ作業の自動化を行う必要がある。
次に自動化の手順を示す。
1 バリ情報の収集
バリ取り・エッジ仕上げの自動化は、バリに関する情報を収集することから始まる。対象を次の観点から見極める必要がある。
(1)バリ取り・エッジ仕上げの目的確認とエッジ品質の定量化
(2)バリの生成状態の把握
(3)人手によるバリ取り工具とその利用方法
2 バリ取り・エッジ仕上げ法(工具)の選択
ロボットを利用する場合、基本的に人手によって行っているバリ取り・エッジ仕上げ作業を、ロボットに代替させるパターンが最も多い。自動化への近道は、現在実際に使用しているバリ取り工具を選択することにある。
(1)バリ取り工具(ツール)の選択
(2)ロボットの利用方法(ワーク把持、ツール把持)
(2)のワーク把持型およびツール把持型に共通な必要機能として、次の要件が挙げられる。
ⅰ:部品のバラつき(寸法、形状)への対応が可能であること
ⅱ:ツール(切れ刃)の摩耗への対応が可能であること
ⅲ:ワーク、ワーク把持具およびロボットアームとの干渉が少ない構造であること
ⅳ:加工条件(ツール回転数、加圧力など)の変更が可能であること
ⅴ:ツール把持型においては小型で出力の大きな駆動源の選定が可能であること
3 バリ取りのテスト加工
次にバリ取りのテスト加工を行う。テスト加工の最大の目的は、自動化にした場合のエッジ品質、加工時間、生産タクトタイムとの関係の見極めにある。
バリ寸法のバラつきが大きい部品を加工し、バリの加工範囲と限界を把握することも重要である。またバリ取り工具の寿命を把握するには量産テストが必要となるが、バリ寸法のバラつきや部品の寸法のバラつきがあり、加工条件も異なるためにその推測は困難を伴う。
4 ロボット援用によるシステム設計
図1に示した絶対位置加工におけるロボットを導入する際は、必要な剛性、位置決め精度および経路保証精度などを選定する。ツール駆動装置としては、バリ取り・エッジ仕上げ作業に必要な動力を持つものを配置すれば、自動システム化が可能になる。そのために必要な技術的ポイントは次の3点になる。
(1)ロボットの選定
(2)バリ取り工具(ツール)駆動装置に必要な機能と機構
(3)適応制御の適用
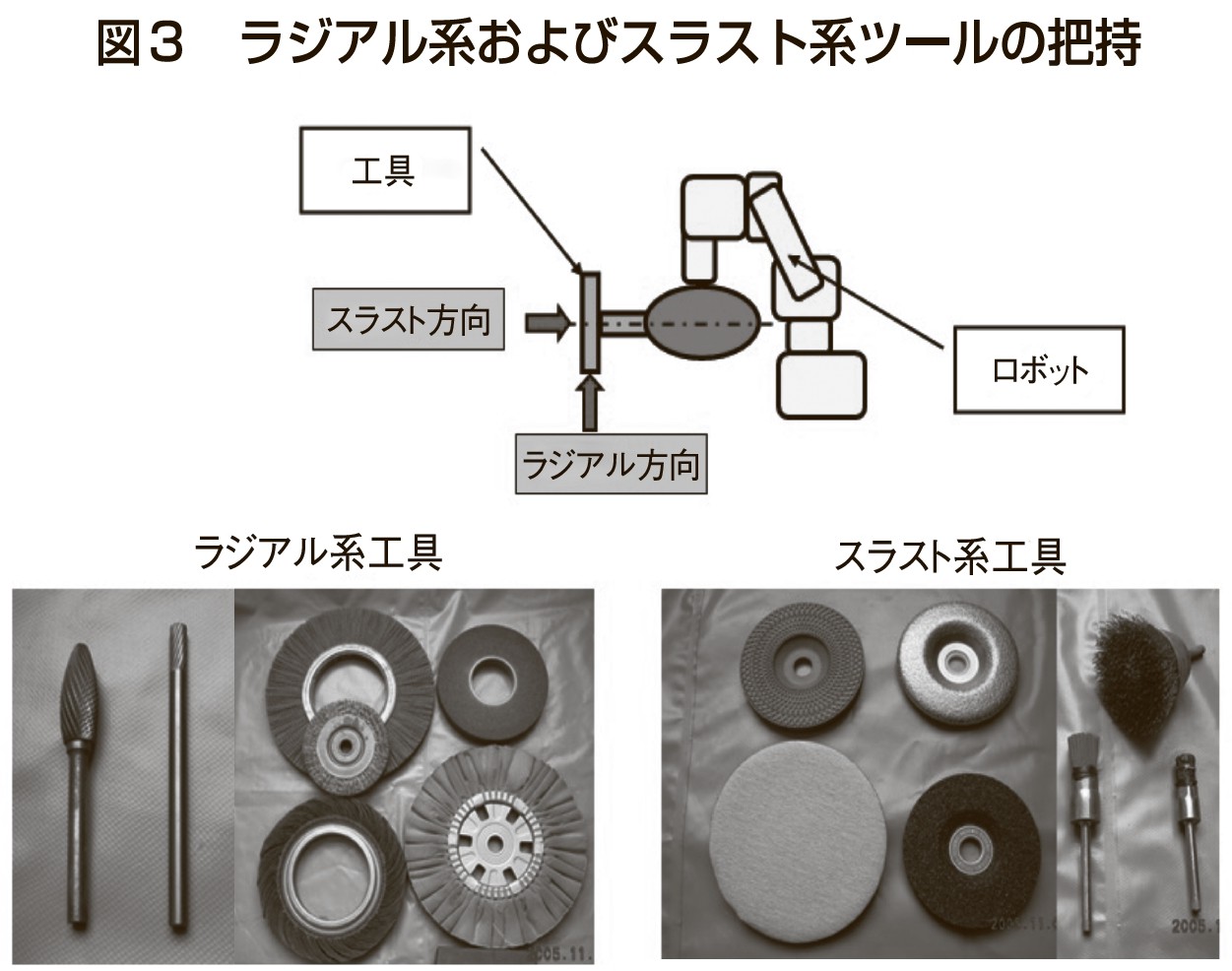
ツールは図3に示すように、ラジアル方向またはスラスト方向にその能力を発揮することを考慮しなければならない。
ラジアル系ツールではツールの外周面で、スラスト系ツールではツールの軸方向の直角面で、バリ取り・エッジ仕上げ加工を行う。
5 ロボット活用の事例
-

【写真1】 ベルトサンダ―利用のロボット研磨システム(TAFLINK) -

【写真2】 ロボットバリ取り自動化セル「RDM—S」(スギノマシン)
・TAFLINKの取り組み
浜松に拠点を置く東洋鐵工所(T)、アラキエンジニアリング(A)、藤本工業(F)の3社で構成される「TAFLINK」は、バリ取り・エッジ仕上げ工程の自動化に挑戦しており、昨年の国際ロボット展に出展した。写真1のような協働ロボットを使った研磨システムで、ベルトサンダーにワークを自動で押し当て、人とロボットが協働してバリ取りや表面仕上げを行うシステムを提案する。
同展では、システムインテグレーター(SIer)不足に対応する取り組みが注目された。
・スギノマシンの取り組み
スギノマシンはスピンドルモーターユニット「BARRIQUAN」を組み込んだロボットシステムを提案する。同システムでは、回転工具を一定圧力でワーク形状に沿わせることで、要求されるエッジ品質に仕上げることを実現した。伸縮型と傾斜型の2種類のスピンドルを搭載して、汎用性の高いスピーディーなバリ取り・エッジ仕上げを行っている。写真2のようにわずか作業者1人分の作業スペースで自動化を実現していることも大きな特徴である。
全国で展示会開催/DSC協会
-

-

【写真3】 第1回仕上げ加工技術展(浜松)
DSC協会は2023年に発足し、3年が経過した。25年度(1—12月)に実施した事業を表に示す。昨年度は例年通りの活動を実施したが、当協会の最大の目標は全国各地域での展示会の開催である。
9月に初めて浜松で浜松商工会議所の後援を得て、2日間にわたり展示会を開催した。会員企業はもちろん、県内外の企業を合わせた18社が出展し、200人を超える来場者を得た充実した展示会となった(写真3)。
これに続き、12月に長野県工業技術総合センターの協力のもと、24年の飯田市に続き、信州モノづくりの町の一つである坂城町のさかきテクノセンターにおいて、9社が出展する形で開催した。極寒にもかかわらず多数の参加者があった。
今後も機械加工工程の最終工程であるバリ取り・表面仕上げ・洗浄工程の省力化を目指す生産現場に対して役立つ協会を目指したいと考えている。読者諸氏の当協会へのご加入をお待ちしている。