-
業種・地域から探す

日本電機工業会賞/日本ロボット工業会賞
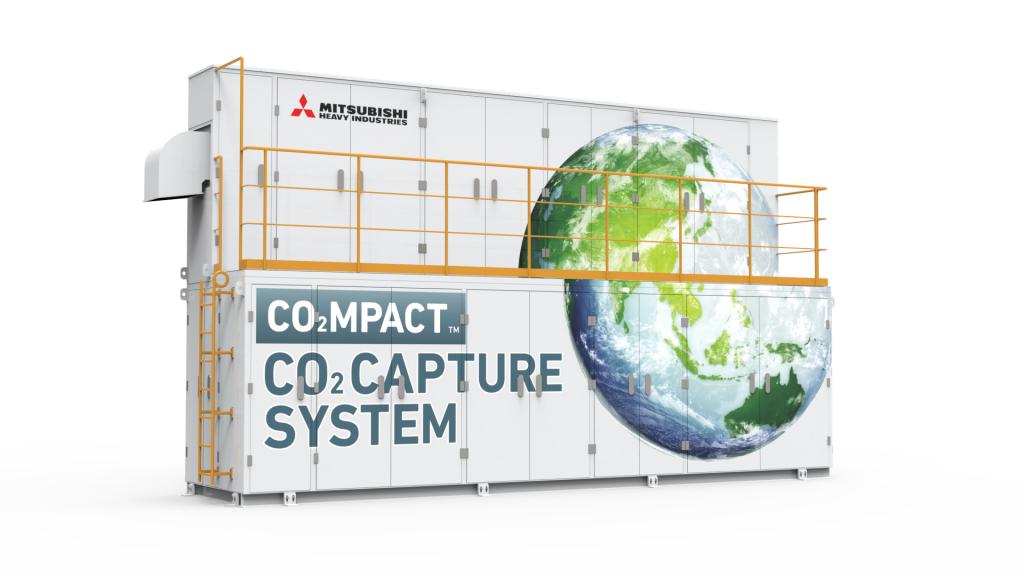
日本電機工業会賞/三菱重工業 小型CO2回収装置「CO2MPACT」
-
-

審査風景
カーボンニュートラルの実現には、CO2排出量の削減に加え、発生したCO2回収との両輪で進める必要がある。本装置は燃焼排ガスからのCO2回収で30年以上の開発経験と世界トップシェアの実績を基盤に、関西電力と共同開発したCO2回収技術「KM CDR Process」の知見を生かした発電設備や化学プラントなどの燃焼排ガスCO2回収ソリューション。小規模な産業設備に即応可能な小型装置は幅の広い市場への普及によってグローバルなカーボンニュートラルに貢献する。
本装置は、エネルギー効率が良く、最小の腐食と吸収液劣化を実現する高信頼性の高性能アミン吸収液「KSー1」を用いた化学吸収法と、①燃焼排ガスを冷やす冷却機能②アミン水溶液にCO2を吸着する吸収機能③CO2を吸着したアミン水溶液を加熱しCO2を分離回収する再生機能ーの三つの機能プロセス連携によるKM CDR Process技術をコンパクトに配置設計し、回収CO2純度は99.9%(体積比)以上。回収能力は日量0.3トン。コンパクトな汎用性の高い標準設計をベースとしたモジュール化により、製造工場からのトラック搬送で、設置の短納期・低コストとしている。回収量により日量200トンまでの5タイプをラインアップし、幅広い需要に対応する。
設備運転に不慣れなユーザーに対し、導入計画・装置設備・運転・保守・アフターサービスまでの一貫したIoTによるワンストップサービスが提供されている。装置下段の左側には、容易に取り扱える独自の自動運転・遠隔監視システムが搭載され、タブレットで運転状況を確認、運用・保守における省人化、省力化と最適運転を実現させ、メンテナンスコスト低減が保証される。
装置は冷却→吸収→再生というブロック機能をコンパクトに配置設計しているが、広く市場への普及を目指すのであれば、制御画面においてアフォーダンスデザイン(物が持つ形や色などがその物自体の扱い方を説明するという考え方)に基づく有効なGUI対応、屋外操作のためモニターの視認性向上(画面傾斜や遮光による明瞭表示)などの対策が望まれる。
装置は幅10メートル×奥行き2メートル×高さ2.5メートルの横型コンテナ上に、幅8メートル×奥行き0.7メートル×高さ2.5メートルの薄型コンテナを積層するシンプルなボックス造形で、下段上面は2層部のメンテナンスフロアを確保、総高は5メートル、総重量は9.5トンで固定据え付けされる。この造形は装置の小型化とコンテナ輸送を可能とする設計となっており、また量産化を見越した汎用性にこだわり、手軽さ・軽快さ・機動力・容易性などを具現化する標準設計意図が込められている。
複雑なインナーの配管・機構をパッケージし、プロダクトフェースとしての前面は、開閉式扉を含めシンプルでプレーンな平面であり、これをキャンバスにブランド・製品名、さらにエコイメージのグラフィック処理が施されている。
世界のカーボンニュートラル化に直接的な貢献をする環境対応型の装置の見せ方として、パッケージデザインの域を越え、生態系に見られる融和のデザインが期待される。
日本ロボット工業会賞/イシダ マッチング計量機 GCW-V
-

-

審査風景
食品製造現場において、付着性が高く搬送が難しい冷凍パスタや惣菜などの食品は、計量の自動化ができず、長時間にわたり過酷な作業を人手に頼る現状がある。本装置は複数のロボットハンド「ツンモリハンド」で食品を把持し、「マッチング計量」によって組み合わせて適量に分けることで、個包装を自動化する。
清潔性や衛生面などの観点から、水洗清掃など水対策が必要な中食市場に向けて、人と環境に優しい把持方式組み合わせ計量機で要請に応える。
本製品は不定形で付着性の高い食品を把持するロボットハンド技術と、一度に複数のパターンを算出するマッチング計量技術を導入した計量機。ステンレス製ツメ6本のハンドを同時に回転・開閉動作させ、4列4行16個のハンドが2セット搭載され、交互に計量を行う把持部ハンドと、2軸パラレル機構により把持部へ移動させる食品充填バット2台それぞれの動作を融合させ、機械搬送が困難な食品の高速・高精度な自動計量を実現。既存計量機と比べ14%の生産増を達成する。
計量は①個々のハンドでつかんだ商品を計量②目標質量範囲に入る組み合わせパターンを計算し、歩留まりと稼働率を両立できるマッチングパターンを決定③決定したパターンを順番に開放し、商品をバットに排出する。
装置はオールステンレス製で防水性があり、モーターなどの駆動源から取り出し可能なハンド構造や、食品が充填されたバットを把持部へ移動させ高い衛生性と清掃性を具備している。計量範囲20ー500グラム、計量能力毎分50回。把持量調整機能でハンド開き量や把持位置を調整する機能を標準搭載する。
制御盤は計量値・上限値・能力・ハンド開き量・ハンド差し込み量の5項目入力の簡単操作。シンプルなGUIは簡潔にデザインされ操作性に配慮されている。バット内の食材高さをエリアごとに検知、独自のアルゴリズムで組み合わせに適した把持量に調整する機能を持つ。
バットは片手で着脱できるシンプルな構造と防水性の高い2軸パラレル機構の採用で清掃時間を3分の1にし、作業負担軽減と高い清掃性を両立させている。専用バット台車はフリーベアリング構造で搬送台上をスムーズに移動、約20秒でバット交換による食材追加が可能であり、作業性と省人化・稼働率向上を実現している。1人で2台の運用を想定している。
パスタを把持するため食品が付着しにくいステンレスシャフト製のハンドは、食品の詰まったバットへの差し込みやすさ、把持量の調整しやすさ、開放時の残留しにくさ、清掃しやすさ、異物混入リスクの低減など、把持・計量・安心安全を実現するシンプルな開閉構造とツメの先端形状を最適化した造形配慮がみられる。
パスタを把持するため食品が付着しにくいステンレスシャフト製のツメ6本を同時に回転させ開閉動作を行うハンドを開発し、マッチング自動計量機として実現した本機は、省人化や生産性向上に対応、働き方改革や食品ロス削減という社会課題解決の一翼を担う。装置は、床設置のみならず、架台対応の据え付けもあり、作業性や安全性をさらに向上させる現場対応へのリサーチを必然づける。
現物審査で注目されたデザイン技術開発/ハンド技術と組み合わせ軽量を融合
-

北條正晃氏(右上)、岡野弘志氏(左上)、前田修一氏(右下)、立川聡氏(左下)
第四開発部 自動システム開発二課 係長 前田 修一
自動システム開発二課 立川 聡
第四開発部自動システム開発一課 主任 北條 正晃
自動システム開発一課 岡野 弘志
食品工場では付着性の高い食品を計量する作業は人手に頼っているのが実情であり、深刻化する人手不足からも自動化は急務である。それに応えるべく開発したのが、ハンド技術と当社が誇る組み合わせ計量の技術を融合させた、マッチング計量機GCWーV(Gripper Combination Weigher)である。
プロジェクト開始当初は、人のように一つのハンドで一定量の食品をつかむことを目指し、さまざまなハンドの試作と検証を繰り返した。中でも大学との共同研究から生まれた「ツンモリハンド」は、食品が付着しにくいステンレス製シャフトのツメ6本を回転させて開閉する機構で自由度が高く、食品群から目標量をつかむことに優れていた。
しかし、熟練した人を超える計量機として、計量精度や生産スピードを向上させる必要があった。
ブレイクスルーは社内技術「組み合わせ計量」にあった。複数のハンドで個々につかんだ食品の重さを計量し、足し合わせることで目標量を作り出すという原理である。早速12個のハンドを並べた要素機を製作・実験したところ、計量精度に対して大きな手応えを感じた。
そこから開発は加速し、生産スピードは組み合わせ計量を一度に複数回計算するマッチング計量へと進化させることでクリアし、防水構造(IP66)実現のために2軸パラレルロボットを開発。誰でも簡単に扱えるインターフェースやハンド制御などアイデアを出し合いながらさまざまな技術を投入し、現場で通用する製品を作り上げた。
発売後の展示会での反響は大きく、導入いただいたユーザーからも高い評価を得られた。その一方で多く聞かれたのが「もう少し小型のものが欲しい」という声であり、早速小型機の開発を進め、今年6月の展示会へ出展した。GCWーVはまだ基本タイプが出来上がった段階であるが、ハンドや周辺機構といった自動化技術をさまざまな生産現場に適応できるよう進化させ、世界のユーザーの要望を革新的に解決し貢献していく。