-
業種・地域から探す

レスキューロボット 最新技術動向
東日本大震災で初適用
-

福島第一原子力発電所の事故対応で使われた「Quince」
レスキューロボットの研究開発は1995年に発生した阪神・淡路大震災にさかのぼる。6400人を超える死者を前に、その当時は人命救助に出動するロボットはなく、世界で研究者はほとんど皆無だった。
その16年後に発生した東日本大震災は、多くのロボットが適用された歴史上初めての大規模災害だった。
その当時はすでに、「救助・レスキュー」はロボティクスの応用課題の一つとして定着し、災害に対する有効性が数多くの研究論文に書かれる時代になっていた。とはいえ、ロボットの配備は進んでおらず、世の中の期待の大きさに比べて、その貢献はあまりにも小さかった。
筆者は原子力施設対応のロボットを研究した経験は皆無だった。しかし、目的外だったにもかかわらず、また、現場配備は本来大学の役割ではないにもかかわらず、それまで研究してきたレスキューロボットが福島第一原子力発電所における災害対応ロボットとして使用されることとなった。その結果、同発電所の冷温停止状態の実現にわずかでも寄与できたことは、良い経験となった。
ドローン活用 迅速対応
-
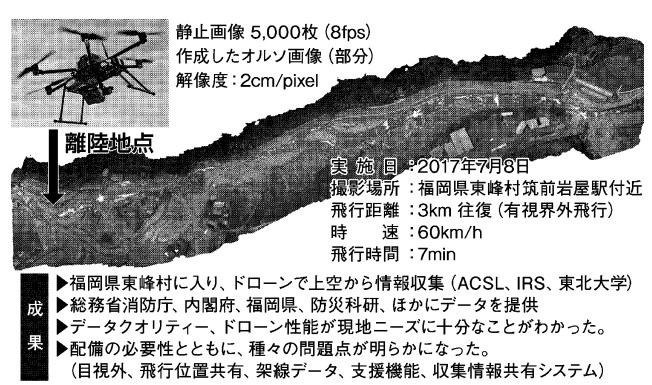
ドローンによる九州北部豪雨災害 緊急災害調査 -
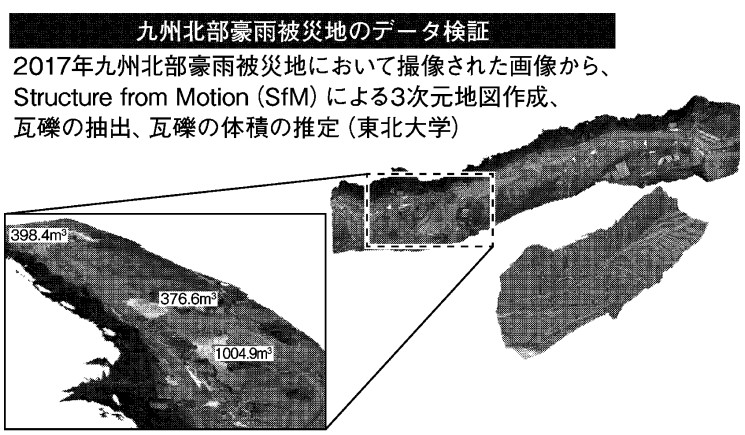
ドローン画像からの瓦礫体積の推定
2022年までに発表された国連気候変動政府間パネルの報告書では「30年後には海面上昇で10億人が洪水リスクにさらされ、2~3度Cの気温上昇で1400兆円の資産が被害を受け、100年に一度の災害が頻繁に発生し、感染症が著しく増加する」と予測している。
わが国では18、19年の台風による損害保険の支払額はそれぞれ1兆円を超え、さらに新型コロナ感染症の被害はそれをはるかに上回っている。また、地震発生確率の予測値はあまりにも高く、各自治体では壊滅的な被害想定を市民に公開するようになっている。
残念ながら、地震を含め、自然災害をなくすことはできない。ゆえに、被害が生じないようあらかじめ備えるしかない。さらには、発災時に適切に対応して被害を小さく抑制できるよう、また、いち早く復旧できるよう、普段から準備しておくことが求められている。災害リスクが高まっている今、防災に経営リソースを以前より多く配分する判断が必要と考える。
ぜい弱な箇所に被害が集中することから、事前の調査と改善が重要である。ロボットや飛行ロボット(ドローン)は自動化・遠隔化により、それら対策コストを大きく低下させることができる。さらには従来、見逃さざるを得なかったぜい弱性を、安価かつ迅速に発見でき、レジリエンス向上に寄与する。
ドローンは多くの災害現場で実績を上げるようになってきた。土砂崩れの調査では、概観の撮影、地形変化の測量、土砂量の見積もり、近接撮影による二次崩壊調査など、多くの作業に活用されている。
高性能ドローンに期待
水害においても、浸水エリアの調査、建物被害状況、要救助者発見、浸水状況変化の予測、土手決壊の前兆調査などの実績がある。ドローン調査会社と自治体とが防災協定を結ぶケースも急増している。今後、安全性の社会的コンセンサスが定着し、制度が整備されれば、有視界外における無人飛行調査、無線が途絶した場所での自律飛行まで可能になるよう、技術的準備は整ってきている。
この先5~10年後には、小型ドローンであっても風雨に強く、長時間の飛行が可能になると予測される。全球測位衛星システム(GNSS)に頼らない制御の性能が高まり、狭隘(きょうあい)箇所や入り組んだ場所の至近飛行が可能になる。多数の自律ドローンを同時使用して、効率を上げることが当たり前になる。さらには接触を伴ったドローン作業が技術的に可能になり、空中と水中を自由に行き来して作業するドローンも出現するであろう。実用化が進めば、視認や軽作業であれば、作業員が現場に行く必要や介在する必要すらなくなり、生産性が飛躍的に高まると予測する。近接飛行時や墜落時の安全レベル評価の制度化が、これら高いドローン性能の現場適用には必須である。
点検・検知・緊急時対応… WRSで“ワザ”競う
-

バルブハンドルを回す、優勝チーム「Quix」のロボット「Onix」 -

ワールドロボットサミット プラント災害予防チャレンジに参加したメンバー -

EU共同プロジェクト「CURSOR」の小型捜索ロボット「SMURF」
「ワールドロボットサミット(WRS)2020福島大会」では、大学を中心とする七つのチームが福島ロボットテストフィールドの模擬プラントを使って、ロボットやドローンによる日常点検、設備調整、異常検知、設備診断、緊急事態対応の性能を競った。計器の読み取りやバルブ操作、異常熱源や振動の検知、ガス濃度測定、フランジなど入り組んだ場所の錆や減肉の点検を、自動または遠隔操作で定量的に実施できることが示された。パイプが入り組んだ模擬プラントの中であっても、小型ドローンの視認効率の高さは際立っていた。18年のプレ大会で優勝した独ダルムシュタット工科大学のチームは、そのソフトウエアを商用化した。欧州のプラントでの地上走行ロボットによる自動点検の適用実績は、すでに延べ2000時間を超えたと述べている。
緊急対応のレスキューミッションとしては、火災事故を想定した消火栓の操作、障害物を除去しながらプラント内で倒れた作業者を捜索する課題が実施された。ロボットが遠隔操作により足場パイプを排除し、タンク内の要救助者の様子を撮影した。ロボットによる遠隔化・自動化を進める際には、イレギュラー事象への対応を念頭に置いた使用計画、訓練実施が望まれる。
欧州連合(EU)が実施する科学技術研究の枠組み「ホライゾン2020」では、ファーストレスポンダー向けのロボット・ドローンの研究プロジェクトが多数実施されている。東北大は瓦礫内を捜索する小型ロボットを含む災害対応情報支援システムの共同研究「CURSOR」に参画している。独の技術救援活動組織(THW)などの災害対応機関が中心となって研究プロジェクトが実施されている。ユーザーによる仕様検討、研究開発過程のレビュー、ユースシナリオによる試験評価、ユーザー目線の建設的なアドバイスなど、ユーザーと研究者が一緒になって技術を育てる体制が取られていることが特筆される。商品展開の市場調査、販売数量見積もり、ドイツ規格協会(DIN)による標準化の取り組み、要素技術成果の活用調査など、研究プロジェクト実施後の製品化や配備に向けた取り組みが専門組織により実施されている。
レスキューロボットの研究開発がスタートして25年を経て、適用成果や波及効果が見えてきた。継続して取り組みを進めることが、安全安心の実現に寄与するとともに、イノベーションの種を引き続き創り出していくと考えている。
執筆者:東北大学 タフ・サイバーフィジカルAI研究センター センター長 田所 諭